

在很多具有制导功能的武器弹药的介绍中,经常能够听到“惯性制导”这一功能。所谓惯性制导,就是通过物体在改变运动速度时,通过识别物体运动加速度,从而计算物体的方位、速度、角度等运动状态数据。

图注:飞行器在飞行过程中,会经过多次变轨。轴向加速器能够在不依赖外界的情况下测定飞行器变轨产生的过载,并以此为依据自动修正飞行路线,特别适合容易产生电磁屏蔽的超高声速飞行器。
“惯性”是物体的一种基本属性,导弹的制导系统是怎样利用“惯性”来控制射程的呢?为了控制导弹的射程,制导系统必须确定当前时刻导弹的飞行速度、空间位置及姿态。姿态可以通过姿态稳定系统的陀螺仪获取,现在需要得到的就是速度和位置。
图注:惯性导航模块越来越小型化
根据牛顿定律,物体获得加速度与所受外力合力成正比,同时该物体对施力物件产生一个反作用力,受到的外力合理与反作用力的大小相等而方向相反。这个反作用力就是让检测质量块在参照物当中产生位移的根源,被称为“惯性力”。如果不考虑引力的作用和地球自转的影响,导弹在推力的作用下作加速运动时,就会受到“惯性力”作用,根据这个原理:
第一步,如果能够测量出导弹的“惯性力”,就可以获得导弹的加速度。而只要设法通过对加速度的测量和进行积分运算,就可以得出导弹的飞行速度;
第二步,通过固定公式对加速度的变化进行运算,就可以得出导弹的射程,飞控计算机在得到这些计算数据后,根据预设程序控制发动机和控制面工作,便可以实现对导弹飞行速度、姿态和射程的控制。
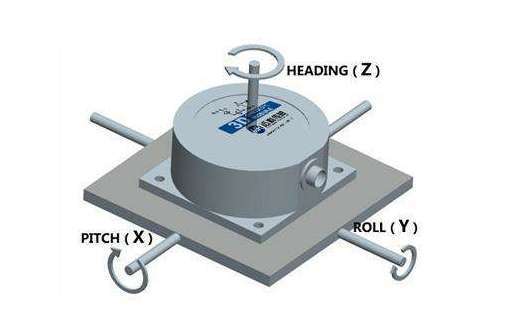
图注:我们俗称的“陀螺仪”其实并没有陀螺,而是一个X、Y、Z三轴稳定器。
所以,在导弹上安装轴向加速器原理的陀螺仪,用于测量飞行加速度,并与其它仪器相配合,这就是“惯性制导”方式的基本原理。
在实际的工程运用中,我们可以把导弹中的惯性导航模块通俗的理解成几个“轴向加速度计”组成的集成设备。每个轴向加速器分别负责测定几个运动数据中的一个,当几个轴向加速器的数据通过汇总,便可计算出导弹飞行状态的变化。
轴向加速器的组成和工作原理也很简单,典型的线性位移式加速度表,主要由检测质量块m、支承弹簧、阻尼器、电位计式传感器、仪表壳体等部分构成。它的结构特征是惯性检测质量块在仪表壳体内能够沿着敏感轴方向作直线移动。这种加速度表往往被用来测量导弹质心的横向加速度。
线性位移式加速度表一般安装在弹体内的惯性稳定平台上,并处于水平状态。如果这种仪表在弹上被安装倾斜了,那么,它的测量将会造成较大的误差。另外,支承弹簧的迟滞和机构疲劳所形成的残余变形,电位计式传感器的误差及其激励电源的变化,表内支承活动部分摩擦力的存在等因素,会使其工作精度受到影响。因此,对于制造由弹簧和检测质量块组成的轴向加速器,对于工艺有十分严格的要求。随着磁悬浮技术的成熟,这种机械连接的方式也随之被淘汰。取而代之的是悬浮式检测模块,通过在电磁场中位移变化来感知加速度大小。
刘晓峰:装备专家,长期从事武器装备论证、预研制工作,主持军工企业省部级重点项目1项,为国防装备建设提供决策性重要参考1项,参与新一代装备关重件试制工作2项,为装备研制和使用部门提供重要建设性改进意见并得到采纳2项,拥有行业内著作1部,在《坦克装甲车辆理事会论文集》发表装备发展规划论文1篇。
出品:科普中国
作者:刘晓峰
策划:金赫
监制:光明网科普事业部
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国