

从《弗兰根斯坦》中用铁钉铆起血肉的人造人,到《攻壳机动队》中用义肢替换器官的生化警察。在很多科幻作品中,都有各种钢铁与血肉混合的“生命体”。
现实中,机器人领域的研究者们也在尝试 将生物与机器进行融合 。他们既可以利用生物材料的某些特性,或者依照仿生学的思路师法自然,也可以直接改造、控制生命,为人类服务。
这类研究,统称为“ 生物混合机器人 ” (Biohybrid Robot) 。
 (机器人领域的研究者们正尝试将生物与机器进行融合 | 《攻壳机动队》剧照)
(机器人领域的研究者们正尝试将生物与机器进行融合 | 《攻壳机动队》剧照)
从传感器到茶包标签
——细胞们的角色扮演
“生物混合机器人”研究中最直接的形式,就是 把来自生命的材料直接装进机器 。
当然,这种研究绝不是恐怖电影中常见的,眼球放进钢铁头骨,或者手臂大腿拼到机械躯干。现阶段,研究者们主要是利用某些生命的一些特殊能力,比如能够发光的细菌。
作为单细胞生物, 发光细菌 能将化学信号转化为光信号,是生物实验室中常见的研究素材之一。它们在很多方面都有着应用潜力,比如作为传感器来使机器在小尺寸下,完成对特定化学物质的探测。
卡内基梅隆大学的研究者 通过人工合成的发光细菌捕捉化学信号,再通过发光二极管激发这些细菌的荧光反应,使细菌发光 。化学物质的浓度会影响光信号的强弱。随后,这些光信号被光电探测器转化为电信号,传输至处理芯片。
将这些发光细菌和配套装置整合到柔性机器手中,就能极大扩展这些机器手的功能——如同为机器手安装上了感受化学信号的“眼睛”。
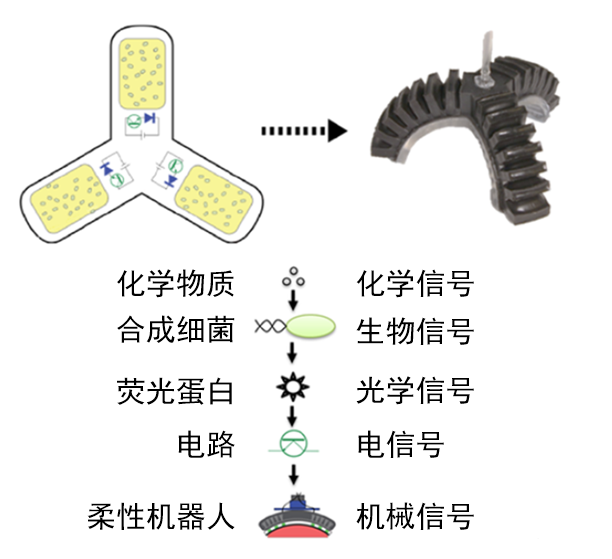 (发光细菌在机器手中起到了传感器的功能 | 参考文献[1]/汉化: 莔莔)
(发光细菌在机器手中起到了传感器的功能 | 参考文献[1]/汉化: 莔莔)
细胞不仅可以作为传感部件使用,也可以作为驱动部件 。日式料理中经常出现一种叫做纳豆的食物,这是由黄豆通过纳豆菌发酵制成的豆制品。纳豆菌细胞对于湿度十分敏感,遇湿膨胀,干燥则收缩。正是这一种看似普通的特性,如若经过巧妙设计,就可以实现出神奇的功能。
麻省理工学院的研究人员设计了一套微米级分辨率的生物打印系统, 可以将纳豆菌细胞打印成各种各样的形状 。通过预先设计的巧妙结构,能让这些纳豆菌细胞构成的物件,成为对湿度变化进行反应的小小机器。比如,打印出的茶包标签会在茶泡好时展开,打印出的干花则可以将湿度变化以绽放的形态显示出来。
 (纳豆菌细胞打印出的茶包标签与干花 | 参考文献[2])
(纳豆菌细胞打印出的茶包标签与干花 | 参考文献[2])
如何飞得更好,这还得听鸟的
除了对生物直接进行利用,“师法自然”也是机器人研究者们的必修课。
1903年,莱特兄弟向鸟学习了飞翔。自飞机问世以来,人类已经设计出了各种各样的飞行器。但是,无论是空中客车还是无人机,它们 在飞行过程中的能量利用率始终比鸟类逊色不少 。
鸟类能够保持高效率飞行的重要原因之一,是它们的羽翼可以对自身形体进行灵活、动态的调节,以适应瞬息万变的气流环境。
通过对鸽子骨骼和羽翼的动力学研究,斯坦福大学的学者 发现了羽翼上不同羽毛之间的运动与协调规律 。他们收集起40根真羽毛,模仿骨骼设计了连杆结构,通过4个微型电机对这些羽毛进行协调控制。这种“ 真羽毛+电机”的生物混合机翼 ,可以在气流中迅速而稳定地变形,从而实现高效飞行。
也许未来的某一天,我们就会搭乘上煽动翅膀的机器大鸟,在空中翱翔。
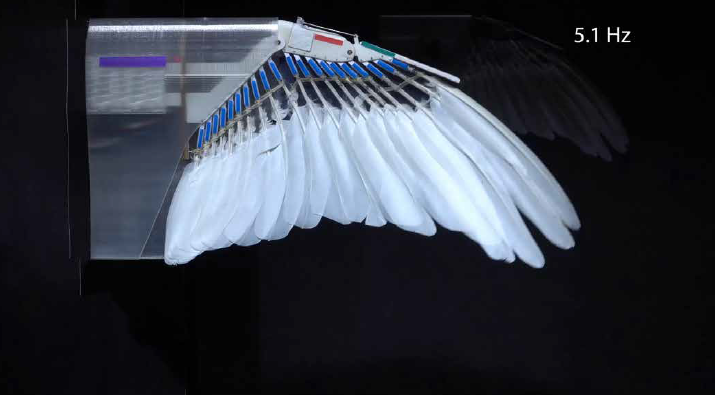 (“真羽毛+电机”的生物混合机翼 | 参考文献[3])
(“真羽毛+电机”的生物混合机翼 | 参考文献[3])
不仅仅是飞行, 机器人的协调运动一直都是研究难点 。比如,怎样让机器如同人类手指一样灵活,就是个巨大的挑战。
东京大学的研究人员参考了骨骼肌, 通过在机器人中加入肌肉组织,让机器在微小尺寸下更加精确、稳定地运动 。他们设计了一个带有关节的机械手,利用对称的骨骼肌进行驱动,使关节能够进行大角度的旋转。很多动物都能做出这种对抗性放松-收缩的肌肉动作——你在拾取或放下东西时,手指上发生的就是这类动作。通过这种设计,就能做出一个灵活的机器手指了。
 (利用骨骼肌完成机器的大角度动作 | 参考文献[4])
(利用骨骼肌完成机器的大角度动作 | 参考文献[4])
朋友,你想驾驭蟑螂吗?
使用细胞或者肌肉作为一部分零件,亦或是从生物的进化中汲取灵感,这些技术思路固然巧妙,但能否更直接些,让我们来操控一个生物!
北卡罗莱纳州立大学的研究者将目光投向了一种和蔼可亲的小动物—— 蟑螂 。
蟑螂能够利用触角感受前方的障碍物,利用腹部上的尾须感受后方天敌的运动,借此改变自己的行动路线——可以说, 触角和尾须,就是它们的天线和后视镜 。
 (背着控制装置的蟑螂 | 参考文献[5])
(背着控制装置的蟑螂 | 参考文献[5])
研究人员将控制芯片、WiFi芯片等集成到了一个轻巧的电路板上,并把这块集成小装置固定在蟑螂背部。通过电极刺激蟑螂的触角和尾须,就能欺骗它们的方向调控。
于是,这样一只背着“小背包”的蟑螂,就能按照指令前进了。
如果实验中使用了广东的蟑螂,说不定能造出一个飞行机器人。
不过,简单的控制已经无法满足科研人员的野心,他们有些大胆的想法—— 从零开始创造“活”的机器人 。
就在今年,美国国家科学院院刊报道了来自美国塔夫茨大学的研究成果:科学家们创造了一款活体机器人,名为“ Xenobots ”。
这款活体机器人 完全由蟾蜍的细胞组成 。准确来说,是两种蟾蜍细胞:一种是 表皮细胞 ,弹性较弱,作用类似于机器人中的骨架;另一种是 心肌细胞 ,能够进行伸缩,可以充当驱动部件。
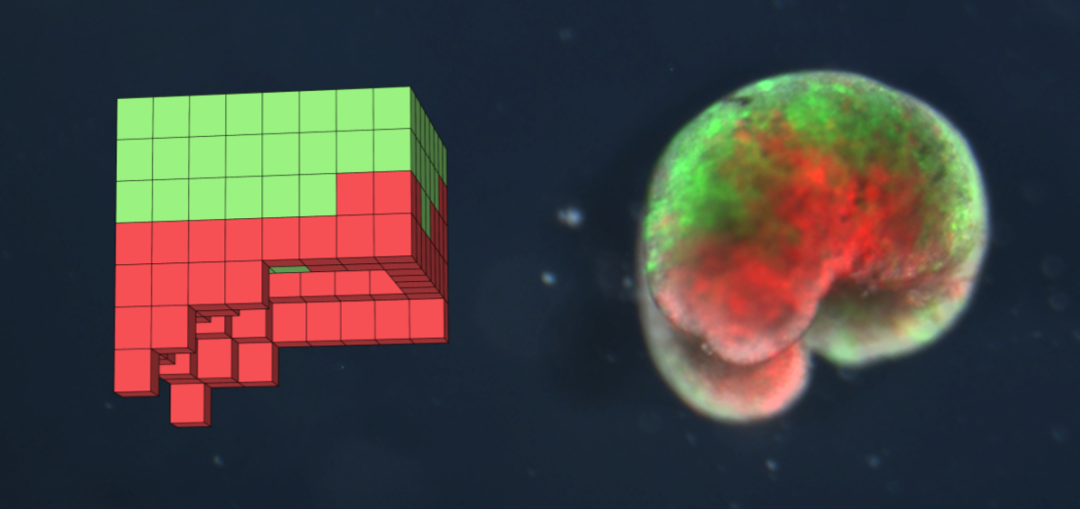 ((左)绿色方块代表蟾蜍的表皮细胞,红色方块代表蟾蜍的心肌细胞。(右)两种细胞组成计算机设计的构型以实现指定的功能 | Sam Kriegman)
((左)绿色方块代表蟾蜍的表皮细胞,红色方块代表蟾蜍的心肌细胞。(右)两种细胞组成计算机设计的构型以实现指定的功能 | Sam Kriegman)
为了让活体机器人可以按照人们指定的方式移动,研究团队应用了遗传算法。当想让机器人完成某种动作 (比如:沿直线移动) 时,遗传算法可以给出一套最优化的模型。按照这一优化模型,研究者使用显微工具对蟾蜍细胞团进行加工,就得到可以做出“指定动作”的活体机器人。这些 基于不同模型的细胞团尺寸在1毫米左右,可以完成移动、推动物体、自动愈合等功能 。
 (Xenobots的一个模型(左)及其实物(右) | www.uvm.edu)
(Xenobots的一个模型(左)及其实物(右) | www.uvm.edu)
这些看似平平无奇的细胞团,就是人类有史以来第一次“完全从头开始设计的生物机器”。
生命与机器的界线
技术飞速进步,生物与机器相互交融,科幻电影中的场景似乎离我们也没那么遥远。
无论是借由生物改进机器性能,还是让机器向生物学习运动方式,生物混合机器人的研究一直在暗示着这样的道理: 只有愈发理解生命,才能更好地创造机器 。
然而,技术之外,更多问题浮出水面。
生物与机器间的界线逐渐模糊:Xenobots由100%的细胞构成,那么,该称其为“生物”还是“机器”?
或者,我们又该如何定义“生命”?
当人类试图扮演造物主,接下来的故事如何发展,充满未知与挑战。
(不过,控制蟑螂那个,请你们抓紧研究!能不能把它们设置成绕开我家!)
 作者名片
作者名片
 作者:莔莔
作者:莔莔
编辑:圆的方块
排版:雷颖
题图来源:《机械姬》剧照
参考文献:
[1] Justus, Kyle B., et al. "A biosensing soft robot: Autonomous parsing of chemical signals through integrated organic and inorganic interfaces." Science Robotics 4.31 (2019): eaax0765.
[2] Yao, Lining, et al. "BioLogic: natto cells as nanoactuators for shape changing interfaces." Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems. 2015.
[3] Chang, Eric, et al. "Soft biohybrid morphing wings with feathers underactuated by wrist and finger motion." Science Robotics 5.38 (2020).
[4] Morimoto, Yuya, Hiroaki Onoe, and Shoji Takeuchi. "Biohybrid robot powered by an antagonistic pair of skeletal muscle tissues." Science Robotics 3.18 (2018): eaat4440.
[5] Latif, Tahmid, and Alper Bozkurt. "Line following terrestrial insect biobots." 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE, 2012.
[6] Kriegman, Sam, et al. "A scalable pipeline for designing reconfigurable organisms." Proceedings of the National Academy of Sciences (2020).

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国