

自动返航是无人机在飞行的过程中,当遇到有突起的山峰或其他恶劣的自然环境时,无人机与地面基站出现失去通信的现象时,无人机能够果断判断飞机处于失联情况,自动做出返航的决断。
背景无人机在飞行的过程中,由于很多时候都处于超视距的范围,为了保证无人直升机的安全,自动返航系统是相当必要的,自动返航是无人直升机在飞行的过程中,当遇到有突起的山峰或其他恶劣的自然环境时,无人直升机与地面基站出现失去通信的现象时,直升机能够果断判断飞机处于失联情况,自动做出返航的决断。
为了判断无人机是否己经失联,基站程序中在空闲的时候发送一个“$”字符作为基站与飞机通信的呼吸信号,当飞机在规定的时间内没有接收到呼吸信号时,就判断飞机处于失联状态,按照飞机上的返航程序自动返航。
设计原理无人直升机上的自动返航有两种不同的设计方法,一种是在轨迹规划的时候,在近距离的时候规划好一组最后规划点在原点的完整的路线,另外一种是在飞行的时候,保存飞机己经完成飞行的规划点,当检测到飞机失去联系时,无人机自动进入返航模式,按照与原来相反的顺序自动弹出到未飞行队列。
在第二种系统中,需要另外一片内存用于保存己飞行目标点,保存己飞行目标点的方法是在目标队列queue[i][j]弹出的时候顺便保存一份到re_queue[i][j]内存中。此外需要基站在发送端空闲的时候自动发送呼吸信号,无人直升机串口接收程序中检测是否接收到基站发送过来的呼吸信号,当未检测到呼吸信号时,connect flag标志位复位,当检测到失联的时间超过一定时间时,飞机自动按照re-queue[i][j]的点来更新。程序中设置的失联触发时间时10s,即当超过10s没有接收到基站的数据时,进入自动返航模式,自动返航程序流程图如图所示。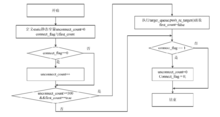
关键技术运动检测算法(1)图像差分算法。图像差分利用相邻两帧图像差值获取运动目标,去除两帧图像的共有背景。优点是计算简单,缺点是图像采样率、移动目标的移动速度、目标与摄像头的距离会对检测效果产生很大影响,当目标与摄像头距离较近、目标移动过快、图像采样率低时,会产生大量背景区域出现于目标区域中,这样对于后续想要用目标矩形作为目标的轮廓框比较困难,不能完整分割出目标。为了改善帧差检测使目标存在的较大空洞,也出现了改进的帧差运动检测算法‘6’。
(2)模板匹配算法。这里所说的模板匹配算法中的模板指的是存人在内存中无人机图片库,通过比对模板与视频中每一帧图像,寻找无人机在每帧图像中的位置,比对的方法通过相关两幅图像。这种算法的优点在简单场景中匹配比较准确,不需要进行滤波处理,缺点是对内存和CPU性能要求较高,考虑到目标离摄像头的距离,内存需要存储大量实验目标的图片作为模板,且对应的相关操作有大量的乘积运算,计算要求较高。该算法适合目标与摄像头距离比较固定的场合。为了改善计算时间较长,出现了改进归一化的灰度匹配算法。
(3)背景减除算法。背景减除算法是用当前图像减去背景图像得到差值图像,通过设定一定的阂值将绝对值的差值图像转为二值图像。然后通过滤波等操作得到移动目标,这种算法适合于背景在大部分时间可见的场合。
无人机位置信息确定利用上述运动检测算法检测出无人机之后,然后需要确定无人机位置信息。位置信息的确定可以控制无人机运动方向和移动的距离。由于摄像头处于停机坪中间即无人机的起飞点,图像的中心也是停机坪的中心,如果以图像的中心为原点,正北和正东分别为y轴和x轴,无人机所在水平平面建立直角坐标系,只要获取无人机在图像中的坐标即位置信息。无人机的高度由无人机上数字气压计给出。2
本词条内容贡献者为:
胡启洲 - 副教授 - 南京理工大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国