

全状态回授(Full state feedback)也称为极点安置(pole placement),是反馈控制系统理论中的一种控制方式,规划受控体的闭回路极点在S平面中事先定义的位置上。
定义在规划控制系统时,会希望可以规划极点的位置,因为极点位置直接对应系统的特征值,而特征值直接影响系统的反应特性。若要用此方法控制,系统必须有可控制性。在多输入及多输出的系统中常用此方式控制,例如主动悬架系统。1
原理开回路的系统若系统的开回路特性可以用状态方程式来表示

而其输出方程式为

则系统转移函数的极点也就是以下特征方程的根

全状态回授是利用输入向量 来达成。考虑一输入可以表示为一矩阵和状态向量的乘积,
来达成。考虑一输入可以表示为一矩阵和状态向量的乘积,

有状态回授的系统(闭回路)

将输入向量替换到原来的状态方程:


全状态回授系统的极点是矩阵 特征方程的根,
特征方程的根, 。比较方程式的项以及理想特征方程的系数,可以得到回授矩阵
。比较方程式的项以及理想特征方程的系数,可以得到回授矩阵 的值,也就是让闭回路特征值在理想特征方程极点上的对应矩阵。2
的值,也就是让闭回路特征值在理想特征方程极点上的对应矩阵。2
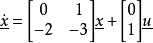
全状态回授的例子考虑状态方程如下的控制系统
控制前的系统其闭回路极点在 及
及 。假设为了响应的考量,需让闭回路极点在
。假设为了响应的考量,需让闭回路极点在 及
及 。理想特征方程为
。理想特征方程为 。
。
依上述步骤,可得 ,而全状态回授的系统特征方程为
,而全状态回授的系统特征方程为

让此特征方程等于理想特征方程,因此可得

因此, 可以使闭回路极点在理想位置上,让响应也是理想值。
可以使闭回路极点在理想位置上,让响应也是理想值。
此作法只在单一输入的系统有效。多重输入的系统也会有K矩阵,但不唯一。因此不一定可以很快找到最佳的K值。此情形比较适合使用LQR控制器。1
本词条内容贡献者为:
曹慧慧 - 副教授 - 中国矿业大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国