

时差定位法(location by difference of times)是确定点的位置的一种方法,即利用声波或电磁波到达两点的时间差来确定点的位置的方法,其基本原理是:到两定点的时间差与声速(或光速)之积为定值的点在双曲线的一支上,船舶在一望无际的海洋上航行,需要测定自己在海洋上的位置,可以在沿海或岛屿上选择三个适当的地点,建立一个主导航台F和两个副导航台F1,F2。航行的船舶上装有定位仪,能接受从主导航台发出的无线电信号和从两个副导航台转发出的相同无线电信号,从定位仪上读出三个信号间的两个信号时差,查阅预制好的双曲线时差定位海图,便知船舶在哪两条双曲线的交点处,双耳听力健全的人能判断声源的方位也是根据这个道理1。
基本介绍时差定位法根据同一声发射源或电磁波发射源所发出的声发射信号或电磁波发射信号到达不同传感器的时间差异以及传感器布置的空间位置,通过它们的几何关系列出方程并求解,可得到声发射或源电磁波发射源的精确位置。可以同时布置多个传感器阵列,保证至少一个阵列可以接收到声发射信号。时差定位法假定材料声传播各向同性,声速为常数。文中以声波举例分析时差定位法2。
一维线定位法一维线定位就是在一维空间确定声发射源的位置,也称为直线定位。一维线定位至少采用两个传感器和单时差,是最简单的定位方式。

取两个探头连线的中点为坐标原点,取从1到2为正方向,如图1所示。声发射源的位置坐标可由下式确定

式中:△t为到达两探头的时差(取绝对值);C为声速(循规波的声速)。
sign(△t)=1,信号先到探头2;
sign(△t)=-1,信号先到探头1。
为了保证线定位的准确性,波速是关键因素。它与声发射波的模式、激励方式、材料、被检物体表面形状甚至天气情况都有关,因此要计算波速是非常困难的,最好的方法就是提前通过实验测定波速。一维线定位可用于焊缝缺陷的定位,输送管道缺陷的定位。

一维线定位法传感器布置的一般形式如图2所示。设声发射信号从声发射源Q到达传感器 的时差为△t,声速为C,则
的时差为△t,声速为C,则

离两个传感器距离差相等的轨迹为一条双曲线(如图2所示),声发射源位于双曲线上的某一点。这种线定位仅提供波源的双曲线坐标2。
二维平面定位法二维定位至少需要三个传感器和两组时差,但为了得到单一解,一般需要四个传感器、三组时差。传感器阵列可以任意选择,但为了运算简便,常采用简单阵列形式,如三角形、正方形等2。
三个传感器定位法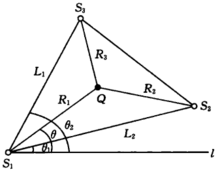
由三个传感器构成的三角形阵列定位原理见图3。S₁、S₂、S₃为所布置的传感器,可获得的数据为声发射信号到达次序和到达时间t₁、t₂、t₃。假设声发射传播速度为C,声发射源距S₁最远,l为角度参考线。根据其中的几何关系,可以得到以下方程式
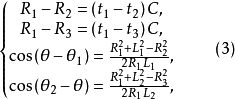
通过求解方程组(3)便可以确定声发射源的位置2。
四个传感器成菱形布置定位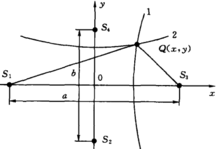
如图4所示,S₁、S₂、S₃、S4四个传感器成菱形布置,构成平面直角坐标系。其实,这是两组线定位传感器的结合。S₁和S₃组成一组传感器,设声发射源发出的信号到达传感器的时差为△tx,可确定双曲线1。S₂和S4组成另外一组传感器,设信号到达的时差为△ty,得到双曲线2。声发射源Q与传感器S₁和S₂,S₃和S4的距离差分别为△Lx和△Ly,波速为C,两组传感器间距分别为a和b。声发射源坐标为(x,y)。可得到以下方程式
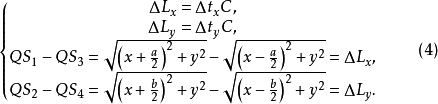
方程组(4)中的后两式就是双曲线1和2的方程式,声发射源位于它们的交点上,结合声发射信号到达各传感器的先后次序,解以上方程组便可确定出唯一的声发射源所在位置。信号接收次序S₁→S₃时,x取负值,反之,x取正值。y轴上S₂→S4时,y取负值,反之,y取正值。
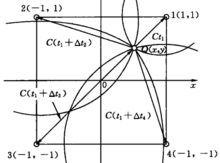
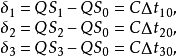
归一化正方阵定位归一化正方阵定位是一种将声源位置坐标按传感器位置坐标归一化的定位方法,如图5所示。将四个传感器分别置于直角坐标系中的位置(1,1),(-1,1),(-1,-1),(-1,1)。声源Q(x,y)的声波到达传感器1的传播时间t1,而传播到传感器2、3、4相对于传感器1的时差为 ,那么Q(x,y)应该位于分别以传感器1、2、3、4的位置为圆心,以Ct1、C(t1+Δt₂)、C(t₁+Δt₃)、C(t₁+Δt4)为半径的四个圆的交点上。四个圆只有一个交点,所以方程组只能有唯一解2。
,那么Q(x,y)应该位于分别以传感器1、2、3、4的位置为圆心,以Ct1、C(t1+Δt₂)、C(t₁+Δt₃)、C(t₁+Δt4)为半径的四个圆的交点上。四个圆只有一个交点,所以方程组只能有唯一解2。
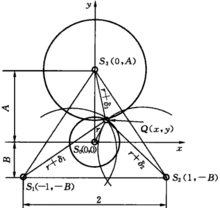
平面正三角形定位法把四个探头分别置于正三角形的三个顶点 及内心S0(0,0),且以内心为直角坐标系原点,如图6所示。Q(x,y)为声发射源,到S0(0,0)的距离为r,则Q(x,y)点到S₁、S₂、S₃的距离与r的差分别为
及内心S0(0,0),且以内心为直角坐标系原点,如图6所示。Q(x,y)为声发射源,到S0(0,0)的距离为r,则Q(x,y)点到S₁、S₂、S₃的距离与r的差分别为
 式中:
式中: 分别为信号到达S₁、S₂、S₃相对于S0的时差;C为循轨波的视在声速。则声发射源Q(z,y)为四个圆的交点2。
分别为信号到达S₁、S₂、S₃相对于S0的时差;C为循轨波的视在声速。则声发射源Q(z,y)为四个圆的交点2。
本词条内容贡献者为:
胡建平 - 副教授 - 西北工业大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国