

折返站指“之”字形改变列车运行方向的车站。
城市轨道交通是一项系统工程, 受到多种因素的影响, 其中折返站的通过能力是制约系统能力的一个重要因素。折返站的折返能力受车站站型、配线形式、道岔配置、信号系统、车辆性能、客运组织等多方面影响。在中间折返站中, 根据所采用列车交路的不同, 对折返模式有不同的要求, 而中间折返站的折返能力又与折返模式的选择有重要的关联。
中间折返站主要折返模式折返模式根据折返线路可分为渡线折返和折返线折返,按照折返线路的位置和形式又可以分为尽头式折返和贯通式折返,按照折返方式可分为站前折返、站后折返及站前站后混合折返。站前折返是指在列车前进方向的到达端咽喉进行折返作业的模式, 站后折返是指在列车前进方向的出发端咽喉(另一端咽喉)进行折返作业的模式。
1、渡线折返模式
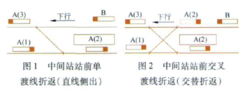
渡线折返主要是利用渡线沟通上下行正线, 借助于行车正线实现列车的转线运行。站前渡线折返主要有单线和交叉渡线折返两种形式。在中间折返站采用单渡线折返时, 有直进侧出和侧进直出两种模式。在上海地铁4号线未形成环形贯通运营时, 列车在大木桥站进行站前单渡线折返作业, 如图1所示;在远期上海地铁2号线的西延伸段、东延伸段修建完毕后, 列车在2号线采用嵌套交路运营, 其中中山公园站至龙阳路站为一个运营区段, 列车在中山公园站采用交叉渡线折返模式。
2、站前站后折返线折返模式
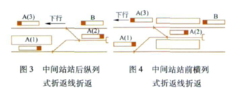
折返线折返模式主要包括站后纵列式折返和站前横列式折返。站后纵列式折返, 是利用上下行正线间站台产生的空隙设置一条折返线, 上海地铁2号线龙阳路站采用的就是这种折返模式。站前横列式折返主要有一岛一侧式和双岛式两种:在中间折返站兼具换乘功能的车站, 一般采用双岛式横列折返, 便于同站台换乘;而一岛一侧横列式折返, 在车站建设工程费用等方面具有一定的优势。上海市地铁1号线的富锦路站采用站前横列式折返线折返模式, 在远期市域线修通后该站即可作为中间折返站运营。
3、双向折返模式
在列车交路采用衔接交路或是嵌套衔接交路时,中间折返站需要具备双方向折返的功能, 根据折返线布置的不同, 双方向折返方式主要有站前渡线折返和站后折返线折返两种。
站前单渡线折返可以采用直进侧出和侧进直出两种形式。在一般情况下, 直进侧出比侧进直出双方向进路干扰要小一些。双方向站后折返线折返, 主要是采取纵列式折返模式, 利用站台间空隙, 在车站两端分别延设两条折返线, 供双方向列车进行折返作业。1

折返模式选择注意事项城市轨道交通中间折返站的折返能力成为线路通过能力的瓶颈, 在中间折返站长短交路列车会产生进路交叉干扰, 降低高峰小时列车通过能力。对上述两种交路下的各种折返模式进行数学分析, 可知在嵌套交路情况下, 站前折返(包括站前渡线折返和站前横列式折返线折返)的干扰强度和干扰概率都比站后折返线折返要小。
在城市轨道交通运营中, 首先要保证运营安全问题, 而站前单渡线或交叉渡线折返均存在一定的安全隐患。因此, 在实际工程应用过程中, 一般应采用站前横列式折返(包括三线双岛式和一岛一侧式站台站型), 其折返线还能够在列车出现故障时兼作临时停车线, 具有各方面的优点。1
折返能力影响信号制式信号技术发展经历了从模拟信号到数字信号再向无线信号发展的三个阶段,每个阶段都有自己的特定产品,都有特定的技术条件。根据系统特点可分为三种类型:
(1)基于固定闭塞方式的ATC系统。应用实例有北京地铁1号线、2号线、八通线、13号线。
(2)基于准移动闭塞方式的ATC系统。应用实例有北京地铁5号线。
(3)基于通信技术的移动闭塞方式的ATC系统。应用实例有北京地铁4号线、10号线、机场线。
由于基于固定闭塞方式的ATC系统属阶梯式控制方式,不易实现列车的优化控制、节能控制,也限制了行车效率的提高,因此在目前正在设计的高密度行车地铁工程中已经被淘汰。为了给旅客提供更加舒适的轨道交通系统,目前常用的信号系统主要有以下两种:
(1)基于数字轨道电路的准移动闭塞ATC系统。
(2)基于通信的移动闭塞ATC系统。
移动闭塞ATC系统区间通过能力大于准移动闭塞,但是对站前折返来说,站前道岔区只允许列车单向通过,所以不论站内列车在什么位置,后续进站列车在进站进路没有开放前不能越过站前道岔(进站信号机)。无论信号制式采用移动闭塞还是准移动闭塞,后续列车都可以获得进站信号机位置。所以,对站前折返来说,移动闭塞和准移动闭塞对折返能力影响来说是没有区别的。
驾驶模式列车在日常运营中有以下4种:
(1)ATO模式。ATO系统根据ATP提供的地面速度限制信息,自动驾驶列车运行,由司机进行监督。
(2)ATP模式。司机人工驾驶列车,按ATP的速度信息运行,一旦超速将实行紧急制动,保证运营安全。
(3)非限制模式。列车由人工驾驶,依靠地面显示信号,按照线路允许速度运行,由司机保证运行安全。用于ATP系统大面积故障时。
(4)限速人工驾驶模式。该模式用于无ATP地面速度信息的地点或者正线地面设备故障时的超速防护。列车由人工驾驶,限速25km/h运行。一旦超速,车载ATP即实行紧急制动。
非限制模式和限速人工驾驶模式都是非正常模式,在日常的运营中很少使用。ATO模式和ATP模式是常用模式,ATO模式由于没有人工驾驶,列车全部依靠车载设备控制,可以不用考虑人的反应时间,而ATP模式除了考虑足够人工的反应时间,还要考虑降低司机驾驶劳动强度,列车速度要低于ATP限速曲线,以避免ATP系统触发制动。所以此模式的能力要低于ATO系统。2
本词条内容贡献者为:
李斌 - 副教授 - 西南大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国