

将无(速度、位置) 传感器控制分为两大类 ,即基于交流电机基波模型的无传感器控制和基于交流电机谐波模型的无传感器控制方法。
简介交流驱动系统的无位置传感器控制与混合动力驱动系统密切相关。不仅是因为机械位置传感器难于集成且很难封装在车辆的传动系内,而且机械位置传感器非常易碎,容易受到电磁干扰和信号失真的影响。所以应尽量减少列位置传感器的使用,或者采用恰当的软件算法以准确跟踪M/G的转子位置,并以此来完全替代位置传感器,这些都将是非常有益的。转子位置传感器的退化不仅是保持混合动力M/G系统平滑控制的问题所在,而且位置信号的损毁会对电流和电压控制器产生干扰,从而导致电机励磁不平衡,引起振动和噪声。传感器的间歇性故障更是危险,因为车辆在行驶过程中遇到坑洼或其他路面干扰时,这种影响可能会反复。
研究者已经解决了多种类型电机的无传感器问题。在说明如何取消位置传感器之前,首先应明确不同类型的电机需要采用不同类型的转子位置检测装置。同步电机(如永磁电机)需要精确指出转子磁体的位置,以保证电枢电流与转子磁通正交。这需要采用绝对位置传感器,在机械分辨率小于0.2度时可以求解轴角位置。电机的极数越多,对轴角位置的机械分辨率要求就越高。求解机械分辨率为0.176度的轴角位置需要采用11位编码器或解码器。另外一个复杂的情况是,求解轴角位置不仅需要11位字长的编码器,而且当M/G额定转速达13000r/rain时,编码器的比特率非常高。因此需要使用高带宽解码器,以确保有足够的比特率能以快速的更新率向控制器提供更为准确的轴角位置信息。
与永磁电机相比,可变磁阻电机和开关磁阻电机对位置检测的要求更为严格。许多ISG的混合动力结构都使用VRM,这种设计。基于6/4凸极模式,两次、三次或多次重复使用电机凸极。为得到这类凸极电机的定时信号,分辨率应高于0.1度。这类位置传感器更可能是实验室级的,(有时可能是精密仪器的质量要求)而非车用环境所要求的坚固耐用的传感器。
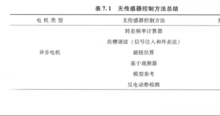
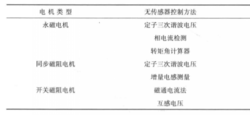
分类Rajashekara等人全面总结了适用于五大主要类型电机的无位置传感器技术。下表总结了交流电机常见的已研究的或正在研究的无传感器方法。所有无位置传感器技术都离不开对电机电流、电压和环境温度的精确测量。
异步电机无位置传感器控制的一种常见形式是测量定子电流和电压,然后使用这些测量数据以及电机的参数数据来计算转差.从励磁频率中减去转差频率就可以得到转子速度。这种方法是可行的,但遗憾的是它需要纯净的转子感应电压。但转子感应电压容易含有直流偏量,会影响积分器的输出。可以使用状态观测器来估算转子磁通.
但这样会受到定子电流和转子磁通跟踪误差的干扰。Yoo和Ha副提出了一种使用主估算器和附加估算器来构建电机转速估算器的方法。一些研究者试图减少定子电流微分对估算转子磁通和电机转速的影响,而这一技术正受到这些研究人员的追捧。特别是Khalil等人,通过估算交流电流及其衍生电流,就能计算转子磁通和转速。该方案使用滑模控制器来测取感应电机的电压参考信号:以高增益观测器来实现对定子q轴电流的微分。该技术的功能框图如下图所示。
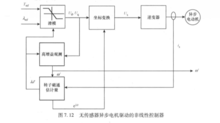
上图所示的控制器不仅可以估算转子速度,同时还能追踪车辆高级别控制器发出的磁通和转矩指令。转换到同步参考坐标系盼定子电流经高增益观测器进行处理,这样可以减小微分器的噪声。
发展永磁电机的无传感器控制也非常适用于混合动力驱动系统,不仅是因为永磁电机可以作为主传动系统的M/G,而且它还适用于其他辅助电力驱动装置。通常使用轴装编码器、旋转变压器或者安装在转子附近或气隙中的霍尔效应器件来感测转子位置。同步电机控制的总体目标是把电机本身作为传感器进行使用。Blaschke等人提出把转子磁链矢量饱和区应用到定子铁心,这样电机作为其自身位置传感器的目标就得以实现。当电机处于饱和状态时,电流传输方向(从静止坐标系到同步参考坐标系)与转子磁链矢量相平行,并且增益小于两者正交的情况,所以通过非对称性就能够确定转子的磁链方向。实际工作过程中,定子电流矢量与转子磁通矢量并行脉动,不会影响电机转矩。
同步磁阻电机的无位置传感器控制与永磁电机相似。所有控制方法都取决于对电机电流和电压的精准测量,同时也应适当考虑温度和电机参数变化造成的影响。从某些方面来讲,由于开关磁阻电机相位之间不互相耦合,可以使用非导通相来监测电感变化,所以在没有位置传感器时,开关磁阻电机的控制更为容易。
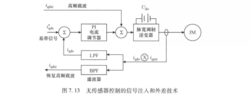
其他无位置传感器控制技术比比皆是。早在19世纪90年代早期.Wisconsin大学就提出采用外差技术对电机进行信号注入和信号检测。信号注入法已经扩展至异步电机,并且已有具体的应用,通过引入特性修正,如对转子开口槽进行修正进而引入转子漏感的空间调制。信号注入和检测技术见上图,这种信号注入方法的精度R/D转换器(轴角转换器)相似,并且精度独立于所引人的转子凸极的实际角度。
下图通过逆变器和特性修正电机(修正转子的感应电机)或典型的同步电机(同步磁阻或内置式永磁电机)的共同作用对外差过程进行了说明。wt为电机转子转速,wc为注入信号频率,外差过程把频率分量转换为±(2wt-wc),其中载波频率大约为400Hz,然而在开关频率为2kHz的逆变器中,载波频率能达到2kHz。基带信号是速率控制下电机的频率指令。低通滤波器(Low Pass Filtering,LPF)提取基带频率并用于对电流调节器(同步坐标)的反馈控制;带通滤波器(Band Pass Filtering,BPF)则从总信号中提取当前位置的调制载波信号以用于对观测器的反馈控制。
大量的研究结果表明,可以使用远离被测电机的传感器来采集电机的转子位置信息,而且这些传感器还可用于对其他信息的测量,例如安装在电池终端的电流传感器以用于交流发电机的同步整流控制。不论是从耐久性的角度还是从成本因素来考虑,都不允许在车辆交流发电机的上面或者内部安装电流传感器。交流发电机的电流纹波是整流二极管的作用结果,它含有交流发电机转子的相关位置信息,因此可以提取这些位置信息并用于有源整流器组件的控制开关。。由于其他系统,如能源和负载管理系统,需要对电池电流进行检测,所以这种方法能够真正实现传感器配置结构的最小化。反电动势观测器用于监测交流发电机的相电压信息,通过采用观察窗可以实现对转子位置的检测。在观察窗中,电池直流电流纹波与相电流相连接。发动机转速和负载的影响会使交流发电机的反电动势频率和幅值发生变化,因此需要使用一个非线性的渐近观测器来估算交流发电机的相电动势大小。这种方法可以在恒定偏移量内跟踪交流发电机的转子位置,并且具有追踪±1000Hz/s速度变化的动态能力。
基于磁链技术的永磁电机无位置传感器控制方法正日益普及。从技术的发展来看,永磁电机的无传感器技术包括感测反电动势,即直接感测120。传导驱动惰性相的反电动势,并通过对电流电压积分求解磁链的方法,还包括监测逆变器续流二极管导通时间的方法。最近Kim等人提出了一种与速度无关的磁链派生新方法。在该方法中,线速度的相关函数包含了电压和电流的测量值,以及对派生电流的划分值,得到的结果函数是与速度无关的转子角度信息,能够估算低速时的转子位置。在实验室环境中.通过此方法来控制四极无刷直流电机(转速20r/min)。1
分类将无(速度、位置)传感器控制分为两大类 ,即基于交流电机基波模型的无传感器控制和基于交流电机谐波模型的无传感器控制方法。前者主要基于交流电机的理想模型 ,根据电机方程中转子位置、转速和电压电流的关系估测转速和转子位置 ,反电动势积分、模型参考自适应( M RA S)以及各种观测器的方法都属于基波模型的方法;后者主要基于电机结构的物理特性 ,通过转子处于不同位置时对应的电压、电流的谐波信号获得转子位置和转速的信息 。
两类方法有各自的特点 ,基于基波模型的方法 ,直接采用电机动态运行中的电压、电流信号估测转速和位置。为了提高系统的参数鲁棒性 ,采用模型参考自适应系统( M RA S)和观测器等方法估测转子转速和位置 ,另外人工神经网络辨识方法也应用在基于基波模型的无传感器控制中。
异步电动机的无传感器控制异步电动机的矢量控制方案需要速度传感器或者位置传感器。由于使用速度传感器具有如增加成本、可靠性问题、抗干扰问题等缺陷,而且实时计算的成本也越来越低,通过运用状态估算功能的软件就可以估算速度和位置值。文献中已经提出了很多用于定子电压、相电流和频率估算速度的方法。
利用无速度传感器得到异步电动机速度的方法,大体上可以分为两类:
·具有转差补偿的开环速度控制;
·具有速度估算的闭环控制。
第一类方法中,通过控制电动机的同步速度,利用转差频率来补偿负载变化;第二类方法中,用电动机的估算速度做闭环速度控制的反馈信号。
用于异步电动机的无传感器转矩控制方法如下:
(1)转差频率计算方法;
(2)用状态表达式估算速度的方法;
(3)磁通估算方法;
(4)模型参考自适应系统(MRAS);
(5)观测器(基于卡尔曼滤波器的观测器,伦伯格观测器)方法;
(6)速度估算的人工智能方法。2
本词条内容贡献者为:
宋春霖 - 副教授 - 江南大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国