

基本原理
实时全息干涉法的基本原理是先记录一张流场未变化时物光波标准波面(或初始物光波面)的全息图。经显影、定影处理后,将该全息图准确复位于光路中的原来位置。然后,用流场变化后的被测试物光与参考光同时照射该全息图,使直接透过全息图的被测物光波面与全息图所再现的原始物光波面(或初始物光波面)相干涉。被测试的流场可以变换,从而得到实时全息干涉图。依据干涉图上条纹的变化情况确定被测物理量。测试过程中,仅需一次曝光记录流场未变化时的波面,然后就可以实时地观察流场变化后波面的变化情况。因此,这种方法也称为单次曝光全息干涉法。
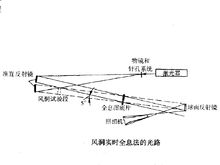
所有双曝光全息干涉法的光路都能用于实时全息干涉法中。只是全息干版在处理以后要准确地复位。图1是一种用于流动显示中的实时全息干涉法的典型光路,用于风洞试验研究中。
影响实时干涉法测量精度的因素有两个。其一是曝光后的全息图经显影定影处理后的准确复位,这个问题采用干版架或原位显影等方法解决;其二是参考光强与物光强度之比对实时全息干涉条纹对比度的影响。实时全息干涉法中选取较大的参物比有利于改善条纹的对比度。但若参物比太大,则由于物光束的绝对光强太小,将导致全息干涉图片上总照度下降。一般,取参物比为3。1
数学分析设流场未变化时的初始物光波 和参考光波
和参考光波 均为平面波。记录平面(即
均为平面波。记录平面(即 ,
, 平面)与物光波面相平行,初始物光波和参考光波的复振幅分别为:
平面)与物光波面相平行,初始物光波和参考光波的复振幅分别为:
参考光波:

初始物光波:

在线性记录的条件下,由上述两光波所记录的全息图透射率系数 按
按 式子有:
式子有:
 式中,
式中, 为未曝光时全息干版的透射率;
为未曝光时全息干版的透射率; 为曝光时间;
为曝光时间; 为全息感光度。对于负片,
为全息感光度。对于负片, 为负值,令
为负值,令 ,则
,则 为正值。所以
为正值。所以 式子可写为:
式子可写为:

 其中
其中 。
。
实时观察时,用原参考光波 与流场变化后的被测试物光波
与流场变化后的被测试物光波 同时照射全息图。由于流场是位相物体,被测试物光波
同时照射全息图。由于流场是位相物体,被测试物光波 与原物光波
与原物光波 具有相同的实振幅,因此被测试物光波的复振幅
具有相同的实振幅,因此被测试物光波的复振幅 为:
为:
 其中,
其中, 为流场变化对光束干扰所产生的附加位相差。
为流场变化对光束干扰所产生的附加位相差。
实时再现时,在 ,
, 两光波的照射下,全息图衍射光波的复振幅为:
两光波的照射下,全息图衍射光波的复振幅为:



 其中,用
其中,用 代表上式中的第
代表上式中的第 项分量。各衍射光波分量 的物理意义如图1所示。
项分量。各衍射光波分量 的物理意义如图1所示。 ,
, ,
, 表示了用参考光
表示了用参考光 照明全息图时再现的零级和正、负一级衍射像;
照明全息图时再现的零级和正、负一级衍射像; ,
, ,
, 表示用被测物光波
表示用被测物光波 照明全息图时再现的零级和正、负一级衍射像。
照明全息图时再现的零级和正、负一级衍射像。
其中 和
和 就代表了流场变化前后,初始物光波
就代表了流场变化前后,初始物光波 与被测物光波
与被测物光波 的相互干涉项。它们形成的干涉条纹即为实时全息干涉图。因此可单独考虑这二项。令
的相互干涉项。它们形成的干涉条纹即为实时全息干涉图。因此可单独考虑这二项。令 和
和 相叠加后的复振幅
相叠加后的复振幅 为
为 ,则所显示的实时全息干涉图的光强分布为:
,则所显示的实时全息干涉图的光强分布为:


利用 和
和 两式子,则:
两式子,则:


由上式可知,在观察视场中光强是按余弦规律变化,亦具有双光束干涉的特点,但与两次曝光全息图的光强分布函数不同,实时全息干涉图的光强分布仅与一次曝光时间 有关。全息干涉条纹的形状取决于被测流场变化前后两物光波的位相差函数
有关。全息干涉条纹的形状取决于被测流场变化前后两物光波的位相差函数 ,即:
,即:
当 时,光强呈极大值,
时,光强呈极大值, 。
。
当 时,光强呈极小值,
时,光强呈极小值, 。
。
其中 。 和 两个式子表明,由于光强分布中的位相含有
。 和 两个式子表明,由于光强分布中的位相含有 ,因而使得实时全息干涉图中呈现亮暗条纹的条件与双曝光全息干涉图正好相反。但实时法的干涉方程仍与双曝光法相同,即:
,因而使得实时全息干涉图中呈现亮暗条纹的条件与双曝光全息干涉图正好相反。但实时法的干涉方程仍与双曝光法相同,即:

与双曝光全息干涉法相似,实时全息干涉同样也可以获得无限宽条纹全息图和有限宽条纹全息图。只要在实时观察时,将被测物光波相对于原始物光波的方向偏转一微小的角度即可。2
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国