

简介
光学系统是指由透镜、反射镜、棱镜和光阑等多种光学元件按一定次序组合成的系统。而大多数光学系统,因为具有对称轴(光轴),轴对称光学系统占大部分,且轴上点光束总具有对称性质。通常用来成像或做光学信息处理。
一个光学系统除了要考虑高斯光学的有关问题,诸如物像共轭位置、放大率、转像和转折光路等以外,还需考虑成像范围的大小、成像光束孔径角的大小、成像波段的宽窄以及像的清晰度和照度等一系列问题。满足一系列要求的实际光学系统往往不是几个透镜的简单组合,而由一系列透镜、曲面反射镜、平面镜、反射棱镜和分划板等多种光学零件组成,并且要通过合理设置光阑、精细校正像差和恰当确定光学零件的横向尺寸等手段才能得到合乎需要的高质量系统。
理想光学系统理想光学系统是能产生清晰的、与物完全相似的像的成像系统。光束中各条光线或其延长
线均交于同一点的光束称为同心光束。入射的同心光束经理想光学系统后,出射光束必定也是同心光束。入射和出射同心光束的交点分别称为物点和像点。理想光学系统具有下述性质:①交于物点的所有光线经光学系统后,出射光线均交于像点。反之亦然。这一对物像可互换的点称为共轭点。②物方的每条直线对应像方的一条直线称共轭线;相对应的面称共轭面。③任何垂直于光轴的平面,其共轭面仍与光轴垂直。④对垂直于光轴的一对共轭平面,横向放大率为常量。研究理想光学系统上述物像两方一一对应关系的理论称为高斯光学。首先由德国科学家C.高斯在1841年的著作中阐明。实际上不存在真正的理想光学系统。共轴球面系统在近轴条件下可近似满足理想光学系统的要求。
基点和基面决定理想光学系统物像共轭关系的几对特殊的点和面。
焦点和焦面光轴上与无穷远像点共轭的点称为物方焦点(或第一焦点),记作F;光轴上与无穷远物点共轭的点称为像方焦点(或第二焦点),记作F'。通过F和F′点并与光轴垂直的面称为物方焦面(第一焦面)和像方焦面(第二焦面)。
主点和主面横向放大率等于1的一对共轭面称主面,两主面与光轴的交点称主点。从物方焦点F发出的任一光线,经光学系统后成为平行于光轴的光线,延长这对共轭光线得其交点M,这交点的集合构成物方主面(第一主面),该主面与光轴的交点H称物方主点(第一主点)。平行于光轴的光线入射后,出射光线交于像方焦点F',延长这对共轭光线得其交点M',该交点的集合构成像方主面(第二主面),它与光轴的交点H'称像方主点(第二主点)。两主面是一对共轭面,两主点是一对共轭点。两主面上任一对共轭点离光轴的高度相等,横向放大率为1。[1]
节点和节面光轴上角放大率为1的一对共轭点称节点,通过节点并与光轴垂直的面称节面。
光学系统的组成光学系统从本质上讲是一种传递信息的工具,其目标就是观察标本或欲测试的零件,此即信息源,给出的是物体空间位置的信息,如果目标不是自发光体,则必须进行人工照明。信息传播介质可以是气体或液体。
光信息的传统接收器是人眼。现代仪器则采用光探测器将信息转换为电信号,以便后续处理。例如,夜视望远镜中对目标要用红外光照明,并由目标的距离、大气的情况、接收器的灵敏阈、目标的反射率等来决定光源的功率;对接收器也只不过从现有的品种中选用。光学系统与光源、接收器的性能密切相关,因此设计者实际上就是要根据信息源及接收器的特征,按规定的功能插入一个正确的匹配器——光学系统。
光学系统按功能主要分成3类:照相系统,显微系统和望远系统。大多数光学系统都是这些基本光学系统的组合和改进1。
轴对称光学系统的特点在人类改造自然的进程中,基于光学技术的方法和仪器占据重要地位,这是因为光学方法有许多独特的优点1。
(1)由于信息加载于光波,因此是一种非接触和非破坏测量,不但可以进行远距离测量,而且可以在危险、恶劣环境中进行测量。
(2)光波传播速度快,可进行实时测量和控制。例如,可以在生产线上进行自动测量、自动识别,可以干预和控制生产。
(3)测量精度高。例如,激光的稳频精度已达1×10-7以上,干涉测量的精度可达1/100波长。
(4)具有很高的空间分辨率。
(5)可进行图象处理。
对称共轴作图对称共轴的性质①光轴上的物点,像点也在光轴上;②过光轴的截面内的物点,与 其像共面;③过光轴的任意截面性质都是相同的;④垂直于轴的平面,同一面内具有相同的放大率;⑤已知两对共轭面位置及放大率,或已知一对共轭面位置及放大率,加上光轴上的两对共轭点,可以确定理想光学系统的成像。
其像共面;③过光轴的任意截面性质都是相同的;④垂直于轴的平面,同一面内具有相同的放大率;⑤已知两对共轭面位置及放大率,或已知一对共轭面位置及放大率,加上光轴上的两对共轭点,可以确定理想光学系统的成像。
作图法证明①已知两对共轭面的位置和放大率,作图证明如下: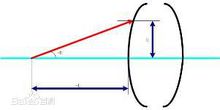 ②已知一对共轭面的位置和放大率,以及轴上两对共轭点的位置,作
②已知一对共轭面的位置和放大率,以及轴上两对共轭点的位置,作
图证明如下:
光学系统的四个阶段所谓光学系统设计就是根据使用条件,来决定满足使用要求的各种数据,即决定光学系统的性能参数、外形尺寸和各光组的结构等。因此我们可以把光学设计过程分为4个阶段:外形尺寸计算、初始结构计算、象差校正和平衡以及象质评价2。
一、外形尺寸计算在这个阶段里要设计拟定出光学系统原理图,确定基本光学特性,使满足给定的技术要求,即确定放大倍率或焦距、线视场或角视视场、数值孔径或相对孔径、共轭距、后工作距离光阑位置和外形尺寸等。因此,常把这个阶段称为外形尺寸计算。一般都按理想光学系统的理论和计算公式进行外形尺寸计算。在计算时一定要考虑机械结构和电气系统,以防止在机构结构上无法实现。每项性能的确定一定要合理,过高要求会使设计结果复杂造成浪费,过低要求会使设计不符合要求,因此这一步骤慎重行事。
二、初始结构的计算初始结构的计算和选择、初始结构的确定常用以下两种方法:
1.根据初级象差理论求解初始结构这种求解初始结构的方法就是根据外形尺寸计算得到的基本特性,利用初级象差理论来求解满足成象质量要求的初始结构。
2.从已有的资料中选择初始结构
这是一种比较实用又容易获得成功的方法。因此它被很多光学设计者广泛采用。但其要求设计者对光学理论有深刻了解,并有丰富的设计经验,只有这样才能从类型繁多的结构中挑选出简单而又合乎要求的初始结构。初始结构的选择是透镜设计的基础,选型是否合适关系到以后的设计是否成功。一个不好的初始结构,再好的自动设计程序和有经验的设计者也无法使设计获得成功。
三、象差校正和平衡初始结构选好后,要在计算机上用光学计算程序进行光路计算,算出全部象差及各种象差曲线。从象差数据分析就可以找出主要是哪些象差影响光学系统的成象质量,从而找出改进的办法,开始进行象差校正。象差分析及平衡是一个反复进行的过程,直到满足成象质量要求为止。
四、象质评价光学系统的成象质量与象差的大小有关,光学设计的目的就是要对光学系统的象差给予校正。但是任何光学系统都不可能也没有必要把所有象差都校正到零,必然有剩余象差的存在,剩余象差大小不同,成象质量也就不同。因此光学设计者必须对各种光学系统的剩余象差的允许值和象差公差有所了解,以便根据剩余象差的大小判断光学系统的成象质量。
评价光学系统的成象质量的方法很多,下面简单介绍一下象质评价的方法。
1.瑞利判断
实际波面与理想波面之间的最大波象差不超过1/4波长。其是一种较为严格的象质评价方法,适用于小象差系统如:望远镜、显微物镜等。
2.分辨率
分辨率是反映光学系统分辨物体细节的能力。当一个点的衍射图中心与另一个点的衍射图的第一暗环重合时,正好是这两个点刚能分开的界限。
3.点列图
由一点发出的许多光线经光学系统以后,由于象差,使其与象面的交点不现集中于同一点,而形成一个分布在一定范围内的弥散图形,称之为点列图。通常用集中30%以上的点或光线的圆形区域为其实际有效的弥散斑,它的直径的倒数,为系统能分辨的条数。其一般用于评价大象差系统。
4.光学传递函数
此方法是基于把物体看作是由各种频率的谱组成的,也就是将物的亮度分布函数展开为傅里叶级数或傅里叶积分。把光学系统看作是线性不变系统,这样,物体经光学系统成象,可视为不同频率的一系列正弦分布线性系统的传递。传递的特点是频率不变,但对比度下有所下降,相位发生推移,并截止于某一频率。对比度的降低和位相的推移随频率而异,它们之间的函数关系称为光学传递函数。由于光学传递函数与象差有关,故可用来评价光学系统成象质量。它具有客观、可靠的优点,并且便于计算和测量,它不仅能用于光学设计结果的评价,还能控制光学系统设计的过程、镜头检验、光学总体设计等各方面。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国