

概述
由于激光与其它光源相比,具备如下特点:探测距离远测距精度高,抗干扰性强,保密性好,体积小,重量轻,故光学系统测距经常采用激光。激光测距是通过测量激光光束在待测距离上往返传播的时间来换算出距离的,其换算公式为: 。1
。1
激光测距仪的分类激光测距仪的分类:激光测距不同于激光测长,它的测量距离要大得多,按照测量距离可分为下述三类:
1、短程激光测距仪,它的测程仅在五公里以内,适用于各种工程测量;
2、中长程激光测距仪,测程为五至几十公里,适用于大地控制测量和地震预报等;
3、远程激光测距仪,它用于测量导弹、人造卫星、月球等空间目标的距离;
激光测距是通过测量激光光束在待测距离上往返传播的时间来换算出距离的,其换算公式为:
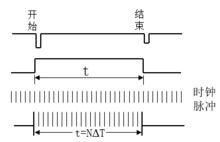
测距方法脉冲测距法测距仪发出光脉冲,经被测目标反射后,光脉冲回到测距仪接收系统,测量其发射和接收光脉冲的时间间隔,即光脉冲在待测距离上的往返传播时间t。脉冲法测距精度大多为米的量级。
相位测距法它是通过测量连续调制的光波在待测距离上往返传播所发生的相位变化,间接测量时间t。这种方法测量精度较高,因而在大地和工程测量中得到了广泛的应用。2
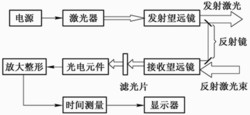
脉冲激光测距定义由激光器对被测目标发射一个光脉冲,然后接收系统接收目标反射回来的光脉冲,通过测量光脉冲往返的时间来算出目标的距离:
测程远,精度与激光脉宽有关,普通的纳秒激光测距精度在米的量级。
t 的测量:在确定时间起始点之间用时钟脉冲填充计数。
激光脉冲测距仪的简化结构如下图所示:
测距仪对光脉冲的要求(1)光脉冲应具有足够的强度;
(2)光脉冲的方向性要好;
(3)光脉冲的单色性要好;
(4)光脉冲的宽度要窄;
(5)用于激光测距的激光器:红宝石激光器、钕玻璃激光器、二氧化碳激光器、半导体激光器。
连续激光相位测距采用无线电波段的频率对激光束进行幅度调制并测定调制光往返一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离,即用间接方法测定出光经往返所需的时间。


卫星激光测距作为激光测距应用的最重要成果之一 ——卫星激光测距SatelliteLaser Ranging ,简称为 SLR)技术起源于二十世纪六十年代,是目前单次测距精度最高的卫星观测技术,其测距精度已达到毫米量级,对卫星的测轨精度可达到1-3 cm。
卫星激光测距技术集光机电于一身,涉及计算机软、硬件技术,光学、激光学、大地测量学、机械学、电子学、天文学、自动控制学、电子通讯等多种学科。因此SLR测距仪系统十分复杂,消耗较大,故障率较高,同时受天气因素制约,维护起来也比较困难,需要花费较大的人力物力,但它又是目前精度最高的绝对观测技术手段。
1.卫星激光测距系统:
卫星激光测距系统按照各部分用途大致分为:激光发射、激光接收、信息处理和信息传输四大部分。
(1)激光发射部分的作用是产生峰值功率高,光束发散角小的脉冲激光,使其经过发射光学系统进一步准直后,射向所测卫星。
(2)激光接收部分是接收从被测卫星反射回来的微弱激光脉冲信号,经接收光学系统聚焦后,照在光电探测器的光敏面上,使光信号转变为电信号并经过放大。
(3)信息处理部分的主要作用是进行卫星测站预报,跟踪卫星,测量激光脉冲从测距系统到被测卫星往返一次的时间间隔t,并准确显示和记录在计算机硬盘上,再由人工或自动方式形成标准格式。
(4)信息传输部分的作用是通过通讯网络接收轨道预报参数和其它指令(下传),上传观测结果所形成的标准格式数据等。
2.卫星激光测距系统组成:
卫星激光测距系统功能分为七大分系统:
(1)望远镜转台分系统
(2)激光器分系统
(3)光电接收分系统
(4)伺服驱动控制分系统
(5)测距控制分系统
(6)微光导星分系统
(7)软件分系统
3.测距精度与激光脉宽:
测距精度是由于激光脉冲前后沿时间差造成的;因此激光脉冲宽度影响测距精度:

4.卫星激光测距主要指标与激光器分系统的关系:
(1)测距精度—激光脉宽;
(2)测程(近地星、远地星)—激光能量、发散角;
(3)回波率—激光能量、发散角、激光脉冲重复频率。
5.测距误差分析:
(1)测距系统仪器误差
–激光脉冲宽度误差
–时间间隔测量误差
–主波计时探测误差
–回波计时探测误差
–时钟同步误差
–时钟频率标准误差
(2)卫星反射器误差
–反射器质心修正值误差
(3)系统延迟测量误差
–地靶距离标定误差
–地靶常规标校测量误差
(4)气象参数采集和大气修正模型误差
6.卫星激光测距应用
卫星激光测距(SatelliteLaser Ranging:SLR)是随着现代激光、光电子学、计算机和空间科学发展而建立起来的一门崭新观测技术。由于它具有独特的测距方式和较高的测量精度,已在地学领域广泛应用。目前,其观测资料已可用于地球物理学、地球动力学、大地测量学、天文学和地震预报等多种学科。3
相位式激光测距仪相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。即用间接方法测定出光经往返测线所需的时间,如图所示。
相位式激光测距仪一般应用在精密测距中。由于其精度高,一般为毫米级,为了有效的反射信号,并使测定的目标限制在与仪器精度相称的某一特定点上,对这种测距仪都配置了被称为合作目标的反射镜。
若调制光角频率为ω,在待测量距离D上往返一次产生的相位延迟为φ,则对应时间t 可表示为:

将此关系代入距离D可表示为
D=1/2ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ)=c/4f (N+ΔN)=U(N+)
式中:
φ——信号往返测线一次产生的总的相位延迟。
ω——调制信号的角频率,ω=2πf。
U——单位长度,数值等于1/4调制波长
N——测线所包含调制半波长个数。
Δφ——信号往返测线一次产生相位延迟不足π部分。
ΔN——测线所包含调制波不足半波长的小数部分。
ΔN=φ/ω
在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。
为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用最多的是延迟测相和数字测相,目前短程激光测距仪均采用数字测相原理来求得φ。
由上所述一般情况下相位式激光测距仪使用连续发射带调制信号的激光束,为了获得测距高精度还需配置合作目标,而目前推出的手持式激光测距仪是脉冲式激光测距仪中又一新型测距仪,它不仅体积小、重量轻,还采用数字测相脉冲展宽细分技术,无需合作目标即可达到毫米级精度,测程已经超过100m,且能快速准确地直接显示距离。是短程精度精密工程测量、房屋建筑面积测量中最新型的长度计量标准器具。现应用最多的是leica公司生产的DISTO系列手持式激光测距仪。
使用注意事项:
DISTO及其他手持式激光测距仪,由于采用激光进行距离测量,而脉冲激光束是能量非常集中的单色光源,所以在使用时不要用眼对准发射口直视,也不要用瞄准望远镜观察光滑反射面,以免伤害人的眼睛。一定要按仪器说明书中安全操作规范进行测量。野外测量时不可将仪器发射口直接对准太阳以免烧坏仪器光敏元件。4
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国