

简介
由于激光器受其本身的热变形、环境振动和空气扰动等因素的影响,出射的激光束在传播过程中常会产生漂移,限制了激光器准直精度的进一步提高,这种漂移就叫作光束漂移。
产生原因激光光线主要存在三种不同类型的漂移,分别是:激光器本身发射的激光存在光线漂移;固定激光发射器的调整装置存在机械位移,导致激光光线缓慢漂移;空气扰动或折射率不均匀造成的光线漂移或者光线弯曲。而针对这三种漂移提出的补偿方案也有很多。12
光束漂移的抑制双光束准直法采用特别设计的光学系统,将激光器发出的光束分成两束光,且当激光束发生光漂时,这两束光朝相反的方向变化,其能量中心即两路光的对称中心线不变,用具有双光电座标的检测靶检测出这条中心线的相对位置,以此作为基准线,从而起到抑制光漂的作用。
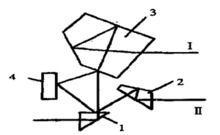
优点:受大气扰动的影响小,光束漂移小,准直基线的稳定性较好,精度达到10
缺点:所用元件较多,调整困难3。
单模光纤法激光束经显微镜聚焦,将光点耦合进入单模光纤,光纤出射端位于准直物镜 的焦点上,使出射光为准直光束,即采用一根光纤建立新的光发射基准。理论计算表明,光束经单模光纤后,其模式重新分布,激光束的平漂、角漂只会影响耦合效率,不会影响出射光强分布。精度达到 。
。
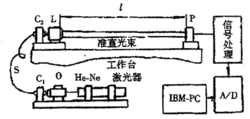
优点:此方法可以完全消除光漂,而且,在保证单模传输情况下,通过光纤后的光束质量也有提高;成本相当低。
缺点:由于机械装置的漂移,长时间后光束会偏离光纤,需重新耦合。
固定点补偿法采用两个或多个光靶来实时测量激光的漂移量,然后据此对测量值进行修正以实现补偿。
缺点:光漂监测和测量不能同时进行,使得各测量点的光漂相关性降低。光线弯曲和大气抖动的影响造成的误差会随着测量距离的增加而增大。
莫尔条纹激光准直法激光器、空间滤波器、扩束镜和锥镜形成无衍射光,利用无衍射光所形成的、不随传播距变化的贝塞耳函数光环作直线基准Z轴。该光圆环光栅相迭,产生的莫尔条纹被CCD采集后存储于计算机。被测物移动过程中相对贝塞耳函数中心线的偏移将会改变莫尔条纹,计算机根据莫尔条纹中心的二维偏移量就可以直接测量出贝塞耳函数光束中心与圆环光栅中心的距离。从而可以用五维驱动装置跟踪贝塞耳函数光环中心来补偿二维偏移量。精度达到 。
。
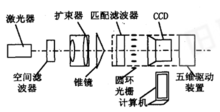
优点:由于无衍射光对激光束的准直性要求小,可以大大减小激光器本身的漂移。
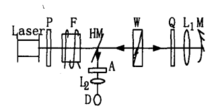
旋光法旋光即一束偏振光通过某些介质时,光矢量发生旋转的现象。经过磁光调制的激光束经半反半透镜HM、位敏元件W、1/4波片Q及透镜L1与球面反射镜M组成“猫”眼”逆向反射系统后,由原路返回,被HM反射经检偏器A、聚光镜L2,最后由光电管D接收。位敏元件W由两个角度均为β的左旋和右旋石英光楔组成,当位敏元件W在纸面内垂直于光轴方向(横向)发生位移时,出射光的偏振矢量方向发生旋转,其旋转量与位移量成正比。
大气扰动影响的抑制方法(1)自适应准直技术:双频激光器出射的两个相互正交的线偏振光通过第一个渥拉斯顿棱镜W1后,分开一小角度,再通过第二个渥拉斯顿棱镜W2后,成为两束平行光!经直角棱镜反射后,再依次通过W2、W1又变成一束光,经探测器D2接收,形成测量信号,D1输出参考信号。光线来回两次通过渥拉斯顿棱镜W1、W2产生的光程差 即由于光束的平漂和角漂引起的光程变化为零#也就是说该系统对光束的漂移有自适应性。
即由于光束的平漂和角漂引起的光程变化为零#也就是说该系统对光束的漂移有自适应性。
优点:考虑了光束漂移、光线弯曲和随机抖动三种误差相互作用的影响,使三种误差因素同时得到修正。
缺点:系统较复杂,不利于与多自由度同时测量系统集成。
(2)共路补偿法:激光发射器1发射的光线,一部分被分光镜604反射后,直接达到光电接收器205,得到激光光线在X,Y两个方向的平行漂移。另一部分透过分光镜604形成光线101经过角锥棱镜303反射后,被分光镜603分成两部分光,一部分被分光镜603反射后,经过透镜203,会聚到其焦平面上的光电接收器202上,得到激光光线在X,Y两个方向的漂移角;另一部分光线透过分光镜603,直接入射到光电接收器401上,得到被测物体或导轨在X,Y两个方向的直线度。按下式可以对直线度误差进行补偿:


式中∆X、∆Y分别为光电接收器401上得到的激光光线位置的改变量,∆α、∆β为测得的激光光线在X、Y两个方向的漂移角, 分别为光电接收器205得到的激光光线在X、Y两个方向的平行漂移,L为活动测量头到固定测量头之间的距离,取决于实际测量时的情况,∆X、∆Y为补偿后的直线度误差。
分别为光电接收器205得到的激光光线在X、Y两个方向的平行漂移,L为活动测量头到固定测量头之间的距离,取决于实际测量时的情况,∆X、∆Y为补偿后的直线度误差。
优点:此系统还可补偿激光器本身带来的角漂,从而提高直线度测量的精度。
缺点:只能补偿空气扰动所带来的角度漂移。
(3)漂移量反馈控制式补偿法:光束经初级准直后变为平行光射向光束平移镜,光束平移镜出射的光经转角反射镜射向分光镜BS1,,和分光镜BS2,BS1反射的光照射在TEPD2中心上用于探测光束的平漂,反射的光经聚焦物镜聚焦在TEPD1中心,用于探测光束的角漂,准直过程中,计算机首先依据TEPD1检测出的激光束在特定方向上的角漂,来控制驱动机构转动角度反射镜使激光束向角漂减小的方向转动,来减小激光束的角度漂移。
优点:对激光束的平漂量及角漂量实现了分离检测和各自实时反馈控制,减小了激光束控制过程中的相互耦合,提高了光束漂移量控制精度达到10-7。
缺点:对控制系统的稳定性和精度要求较高
(4)光束屏蔽法: Harrison 等人以及杭州大学建立了真空管道系统来降低大气扰动的影响;N.Ikawa 等人也采用了光束屏蔽罩(距离短,但不抽真空)。这些研究都达到了比较高的精度,但是在生产现场使用屏蔽系统是非常不方便甚至是无法实现的。
(5)多次采样平均法:T.Pfeifer 等人认为在 30 秒至 100 秒内多次采样进行平均可以使测值稳定性大大提高。每点测量需 30~100 秒平均,使得整个测量时间大大加长。
光线弯曲的抑制或修正(1)双波长法:根据不同波长的光在传播过程中弯曲不同,由激光器发出两种不同波长的光,测量同时由同一点发出的两个波长的光在传播一段距离后彼此分开的量可求出折射率梯度。这种方法适用于修正几公里以上的长距离测量。
(2)波面变形测量法: 空气折射率梯度导致平面电磁波波面变形,通过测量波面不同点处的相位差,可求出光线弯曲。将波面变形转换成相位测量,具有较高的灵敏度。
(3)单参数测量法: 该方法通过对温度、压力梯度等参数的测量来计算折射率梯度,方法简单,精度主要受温度、压力传感器精度及响应速度的影响。
(4)反向散射测量法: 可通过测量强大激光反向散射而发生的频率移动来求光线弯曲。即由测量空气介质调幅载波频率的偏差求得。4

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国