

简介定义
自调整控制系统是通过自动地调整控制器的参数,来补偿过程特性或环境条件的变化。工业过程采用自调整控制的主要原因有两个:
1.大多数工业过程是非线性的,而设计线性控制器时所使用的线性化模型与具体的稳态工作点有关。显然,当稳态工作点改变时,控制器参数的最佳值就应不同,这就意味着控制器需要有自调整能力。例如,一个简单的液体蓄槽的液位,其时剧常数和过程增益是随液位稳态值的不同而变化的。
2.大多数工业过程是非定常的,具有时变特性,即过程特性随时间而变化。因此也需要控制器具有自调整能力。
研究背景在生产过程中,一个良好的控制系统不但要保证系统的稳定性和整个生产过程的安全,满足一定的约束条件,而且要有一定的经济效益和社会效益。并且由于许多过程往往具有自身的特殊性,有的机理复杂,有的变量间关联严重,而且往往存在着非线性、大纯滞后、时变及各种不确定性,采用简单或常规复杂控制往往难于满足工艺要求。因此,近年来控制理论迅速发展,出现了许多新型控制策略,如神经元网络控制,自适应控制,最优控制和模糊控制等。虽然其中有些理论早已提出,但当时限于技术,实施比较困难或无法实施。而随着计算机控制技术的发展,这些高级控制策略得以成功地应用于生产过程控制。
而在工业控制过程中经常会碰到大滞后、时变、非线性的复杂系统,有时无法获得精确的数学模型。对于这些系统,简单PID算法不能达到满意的控制效果和控制品质。
数字PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制,尤其适用于可建立精确数学模型的确定性控制系统。而实际工业生产过程往往具有非线性、时变性,存在着许多不确定性,对象参数和环境常常随时间发生变化,这很容易引起对象和模型失配,而且各类不确定干扰也会影响控制过程,这样就难以建立精确的数学模型,因此应用常规PID控制器不能达到理想的控制效果。此外,数字PID控制器在静态和动态性能之间,跟踪设定值与抑制扰动能力之间存在着矛盾,通常采用折衷的方法,使系统不能获得最佳的控制效果。同时,在实际生产过程中,由于受到参数整定方法烦杂的困扰,常规PID控制器参数也往往整定不良、性能欠佳,对被控对象的变化适应性很差。针对这一问题,长期以来,人们一直在寻求常规PID控制器参数的自动整定技术,以适应复杂的工况和高指标的控制要求。1
控制算法数字PID控制是一种线性控制,这种控制是将设定值与实际值进行比较构成控制偏差,并将其比例、积分、微分通过线性组合构成控制量,所以简称P(比例)I(积分)D(微分)控制。它是至今为止最通用的控制方法。它的优点是原理简单,使用方便,鲁棒性强。也就是说,其控制品质对过程特性的变化灵敏度比较低,调节器参数调整比较容易;具有无余差功能,精度较高;适应性广,可用于各类工业过程的控制,并已商品化。全世界过程控制中84%为纯PID调节器,若改进型包括在内则超过90%。数字PID控制分为位置式和增量式。
采用位置式PID算法时,计算机的输出可直接与数字式调节阀连接,其它形式的调节阀必须经过D/A转换,将其输出转化为模拟量,并通过保持电路将其保持到下一个采样周期输出信号的到来。而增量式PID算法的计算机系统采用步进电机,多圈电位器或累加器进行控制。1
控制目的工业生产过程的总目标,一般是利用可能提供的能源和原材料,以最经济的途径将一定的原材料转化为预期的产品。为此必须对生产进行监督和控制以满足生产目的,达到高产、优质和低耗。其控制目的可归纳为以下三个方面:
1.抑制外部干扰的影响。控制系统的首要目的是消除外部对生产的影响,即引入控制系统,使过程产生尽可能小的变化,以消除外部扰动对生产造成的不良影响。控制系统的的设计目的是以尽可能小的代价,来争取最佳的控制效果。
2.确保过程的稳定性。使整个系统稳定是控制的最基本目的。对于生产过程本身特性是稳定的,则在外部干扰的作用下,过程无需控制干扰就能达到稳定。在这种场合下,控制的目的只是抑制干扰的影响.保持预定的生产条件。然而,对于生产过程本身特性是不稳定的,则控制目的除了抑制干扰的影响外,还必须使过程保持稳定。
3.使过程稳态和动态工况最优。使过程满足生产指标和安全指标是生产过程的两个基本目的。在达到这两个目的之后,下一个目标就是如何使工厂获得更多的经济效益。假如影响生产过程的操作条件是变化的,就需要按经济目标最大或成本最低的方式去改变工艺操作条件。这就是优化控制的目标。
为了达到上述控制目的。控制系统一般由以下几部分组成:
(1)过程或对象。
(2)测量仪表和敏感元件。
(3)控制器。
(4)执行器。
(5)记录显示装置、信号滤波器等。1
模糊自调整控制系统控制算法的确立自调整因子模糊控制是一种基于规则修改的模糊控制,它的模糊控制规则可随它所控制的过程的运行和环境的变化而自动的修改,从而使系统的性能达到令人满意的水平。这种控制方法较之常规的固定模糊控制规则的模糊控制方法,对环境变化有较强的自适应能力,在随机环境中能对控制器进行自动校正,使得在被控对象特性变化或扰动的情况下,控制系统保持较好的性能。因此它在控制被控对象的同时,还要了解被控过程,它实际上是将模糊系统辨识和模糊控制结合起来的一种控制方式。通过辨识能更好的了解被控过程,以便使控制器能跟上过程和环境的变化。这样,控制器本身就具有一定的适应能力,或者说模糊自调整控制器具有一定的智能。1
系统结构自调整模糊PID控制器是由一个标准PID控制器和一个Fuzzy自调整机构组成。根据输入信号偏差e的大小、方向以及变化趋势等特征,通过Fuzzv推理做出相应决策,在线调整P、I、D参数修正值△KP、△KI和△KD以适应控制系统的参数变化和工作条件变化。研究表明,模糊控制和PID控制的结合是提高控制性能的有效手段。它是为提高系统的控制精度和鲁棒性,而提出的一种利用模糊逻辑对PID控制器进行在线自调整的方法。在系统中,模糊控制器的设计将是设计的核心,因为它的好坏将直接影响到Kp、KI和KD的选取,从而影响到系统的控制精度。自调整模糊PID控制系统结构如图。1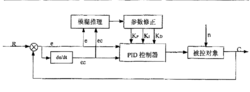
功能块自调整因子模糊控制是在简单模糊控制器的基础上,增加了三个功能块儿构成的一种模糊控制器。三个功能块为:
1.性能测量——用于测量实际输出特性与希望特性的偏差,以便为控制规则的修正提供信息,即确定输出响应的校正量。
2.控制量校正——将输出响应的校正量转换为对控制量的校正量。
3.控制规则修正——对控制量的校正通过修改控制规则求实现。自调整因子模糊控制算法具有很强的自适应能力,因此选择它作为研究对象之一。
模糊控制系统的核心部分是模糊控制器。也就是说,模糊控制器的性能将决定着该系统控制性能的好坏;而模糊控制器自身性能又取决于模糊语言规则合成推理。在通常情况下,模糊控制器一旦设计完成,其语言规则和合成推理往往是确定的,也就是不可调整的。但是,对于某些场合,为了使一类模糊控制系统具有更强的通用性,使它能适用于不同的被控对象,而同样能获得满意的控制特性,这就要求模糊控制器具有自调整性能。自调整因子模糊控制器就具有这样的功能。1
室温自调整控制系统空调系统是通过改变各房间的送风量来适应房间的负荷变化,使系统输送的风量在各房间之间转移,从而减小系统总的设计风量。
空调系统室温对象是典型的强耦合、多干扰、参数时变的非线性系统,采用常规PID控制方法,一般较难达到良好的控制效果。而模糊控制可以对非线性、大惯性、大滞后对象以及难以建立数学模型的对象,获得较好的控制效果。虽然模糊控制具有较强的适应性,其动态响应品质也优于常规PID控制,但由于其不具有积分环节,往往存在静态误差,因此,常常将其与PID控制方法结合起来应用,如Fuzzy—PID复合控制、Fuzzy—PI混合控制、参数自整定Fuzzy PID控制等方法。但这些控制方法中输入变量模糊化的量化因子ke,kec都取固定值,当控制系统逐渐向零误差逼近的时候,最初给定的范围较大的输入论域上的模糊划分就显得比较粗糙,难以取得较高的控制精度;虽然可以通过增加量化级数提高精度,但会使规则搜索范围扩大,降低决策速度。
因此,目前提出了可变论域参数自调整Fuzzy PID控制规律,利用论域伸缩因子αx改变输入变量的论域,从而调整量化因子ke,kec,控制结构如图所示。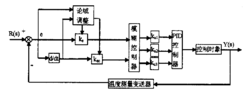
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国