

简介
远程操作是利用无线或电信号对远端的设备进行操作,通常通过网络才能进行。位于本地的计算机是操纵指令的发出端,被控对象叫做被控端或服务器端。远“程”不等同于远“距离”,主控端和被控端可以是位于同一局域网的同一房间中,也可以是连入Internet的处在任何位置的两台或多台计算机。
远程操作技术可应用于网络的自动化管理、实时监控和计算机教学等方面。远程操作软件其实质是一个客户/服务器的应用程序。1
机器人远程操作研究历史早在本世纪60 年代, 国外就有一些专家学者开始致力于机器人远程操作的研究。那时主要是为了星际探险, 如有时需要在地面上操作空间机械手完成一些诸如修复空间站、回收卫星等任务。准确地讲,这种操作是使用无线电的遥操作。由于信号传输速率的限制(电磁波速), 对于近地轨道(约6000km), 信号往返传输时延为0.4s , 而深空近月轨道时延达3s ,再加上其它因素的影响(如计算机处理时间、通信初始化等), 整个系统的时延约6 ~ 15s。而研究表明, 当延迟大于1/4s 时, 操作人员就能明显感觉到延迟的存在, 而且操作性能也会显著降低。2
基于WWW 的机器人的远程操作就是将机器人构建在Internet 的一个Web 站点上, 操作人员通过Web 浏览器(如Netscape Navigator 或Microsoft Internetexplorer)对其进行远程操作。这种远程操作与空间机器人的远程遥控的最大共同点即在于都具有较大的传输时延。在传输速率为14.4kbps 的通信线路上, 传输时延约为6 ~ 11s。由此完全可以想到在Internet 上来模拟进行空间机器人试验。而且对于同样具有较大传输时延的深海机器人试验也可以如此。实际上这只是基于WWW 的机器人的用途之一, 而且这也是其最初被广泛研究的最主要原因。
当今Internet 几乎无处不在, 它极其方便地为人们提供了各种各样的信息和资源。基于WWW 的机器人的极大特点就是开放性。任何人在任何时候、任何地方, 只要能连上Internet , 就能实现对其的操作,而且普通用户可以不必了解机器人复杂的操作原理也能进行操作。WWW 的支持协议是HTTP(Hyper-Text Transfer Protocol), 它支持各种格式文件, 包括多媒体图像、视频等, 因此可以构造出生动友好的操作界面。另一方面, 由于Web 浏览器软件比较便宜(如免费IE), 因此也降低了操作成本。2
国外研究进展1993 年美国国家航空航天局(NASA)Johnson 航天中心与德州的四所大学成功地进行了机器人远程分布式操作试验。该项试验是通过Internet 在Johnson 航天中心操作位于Texas A&M 大学和Texas 大学Austin 分校的机器人, 并同时在Arlington分校和Rice 大学进行监测和性能分析。1994 年美国南加州大学完成Mercury 项目:该项目允许远程用户通过Web 浏览器操作一机械手进行文物挖掘。同时南加州大学在Internet 上已公开的另一个比较有趣的项目是“ TeleGarden” :Web 访问者可以操作一个ADEPT 机械手进行种植, 灌溉花园等活动。
与此较类似的有英国Bradford 大学工业技术系(Dept .Industrial Tech.)于1996 年研制的名为BradfordRobotic Telescope 天文望远镜。该天文望远镜已在Internet 对外开放, 天文爱好者可以通过Web浏览器访问其主页, 操作望远镜的角度和焦距, 而且一般可以在第二天从你的E -mail 信箱里收到观测结果。
另外还有Berkeley 大学研制的Mechanical Gaze系统 , 西澳洲大学的Telerobot等。2
基本操作方案(1)直接操作(Direct Control):这种操作方式也被称作木偶式(puppet approach)。即由操作人员完全操作远程机器人, 对机器人某些设备、装置直接发送动作指令函数以完成某项任务。这显然对操作人员的要求比较高, 操作人员需了解机器人底层指令或编程语言。其基本结构图如下。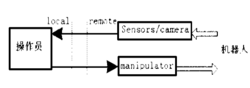
另一方面, 利用虚拟现实模型语言VRML(VirtualReality Model Language)构造的虚拟现实(Virtual Reality)环境也可以实现这种直接操作。
(2)监督操作(Supervisory Control):这种操作方式首先是由W.R.Ferrel 和T.B.Sheridan 于1967 年提出的。其最初是用以研究空间探险机器人的。在传统的双向力反应遥控机器人系统中, 当主从两端存在明显的通讯时延时, 直接主从操作不得不采取“走一走, 等一等” 的方式来保证操作过程的稳定性。这就增大了任务完成的时间, 也加大了任务的难度。因此提出了监督操作。其基本思想就是将远程操作人员置于操作结构闭环之外, 从而努力减小传输时延对整个系统的影响。远程操作人员只是发送目标任务或很小一部分相关的必需指令给远端, 而任务具体由远端回路自治完成;在操作人员方的监控回路向操作员提示有关的传感器信息, 在存在通讯时延的情况下, 还可以进行预报远端下一动作。其结构原理图如下所示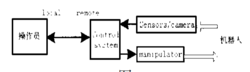 。
。
在远程被控机器人端, 含有一上位缓冲器用于接收、存储远端发至的任务或指令, 并由它“二次”发指令给本地机器人。由于是处于本地, 故不存在时延和不稳定性的影响。这种方法充分利用了执行端的本地智能。这种方法一个典型的应用就是远程机器人路径规划和避碰试验。
(3)预测/预演操作(Predictive/Preview DisplayControl):这种方法是在将操作指令发给远端之前, 先在本地模型对象上进行模拟预演指令执行效果, 并且远端也将实际执行过程通过视频或其他测量数据反馈回来, 这样就大大提高了动作执行的可靠性和正确性。但这种方案比较复杂, 其结构原如下图所示。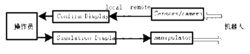
上述三法中显然由于监督操作(SupervisoryControl)将远程操作人员置于闭环之外, 其响应时延的影响也较小, 而且这种方法充分利用了执行端的本地智能, 具有较强的容错和纠错能力(如机器人可以忽略甚至自动改正一些错误指令), 同时它还可以使远程操作人员不必持续监视机器人的工作, 从而可以减轻操作人员的工作强度。2
应用前景由于通信的延迟性和不稳定性, 在目前该项研究还只是处于试验阶段, 但从已有的成果我们可以看到它潜在的应用前途。利用基于WWW 的远程机器人可以模拟进行空间或水下机器人试验;同时对于具有较大延迟环节的工业过程操作系统, 也具有一定的应用价值。
另一方面, 若将这种技术思想推广应用到工业领域中, 即可实现数据网络与操作网络的集成。并可实现虚拟工厂(Virtual Plant)和虚拟制造(Virtual Manufacture)。另可以实现机器人的远程共享, 以进行远程科学实验, 这也符合VI(Virtual Instrument)和VL(VirtualLaboratory)的基本思想。
相信随着通信技术和网络技术的不断发展和进步, 通信传输的延迟性和不稳定性将逐渐地不再是束缚远程操作的瓶颈, 这种基于Internet 的远程操作技术将会有广阔的应用前景。2
远程操作系统远程操作系统的实质是开发自身程序代替系统提供的程序。于是一个远程操作系统的功能的强弱就与开发者对系统的深入了解程度而定。
基本原理和结构结构 远程操作软件以“ 客户机/ 服务器” 形式存在, 包括一个客户机程序(Client)和一个服务器程序(Server或Systry)。服务器程序安放在被操作的计算机端, 客户机程序安装在操作端。
运行原理 服务器程序安装成功之后便会自动收集目标计算机的资料, 包括IP 地址、网络环境、OS环境(甚至超级用户口令)等, 然后将获得的数据经加密处理后形成特殊的确认帧, 反复发往客户机程序所在计算机(或另一虚拟地址空间), 申请被控连接。
客户机程序安装成功之后会在网络上收集服务器程序发回的确认帧信息, 并按照确认帧中的环境参数选择和配置适当的网络协议, 最后向远端计算机发出连接、操作指令。当两台计算机连通之后客户机程序根据操作员意图向远端计算机发出指令,并负责根据服务器程序发回的数据信息在本机上再现远端机屏幕状态。服务器程序则根据指令完成系列进程操作和数据传输。3
具体网络实现要进行网络通讯可以通过WinSock、使用命名管道和邮箱、使用RPC等,。一般来讲, 服务器程序可以同时接受多个客户端的连接请求和其它处理请求, 而客户端也可以同时连接到几个服务器上。在交换数据报之前, 必须计算出数据源, 主机不但要检查IP 报头, 还要检查TCP 和UPT 报头中的两个域:2 字节的IP 源和2 字节的端口号。
要完成网络连接, 另一个值得注意的问题是:对与采用PPP 方式连接的对等网, 每台计算机的IP 地址是随机分配的, 所以在运用Socket 进行连接时, 应该模仿Windows 自身的网络连接方式——— 先进行网络地址扫描, 找到网上的所有计算机(同一域或者不同域)。3
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国