

简介定义
电子仿真平台采用电路描述语言来描述电路的结构、参数以及电路的特性,接着它能够根据使用者设置的参数对电路进行仿真计算,并根据仿真结果验证所设计电路的可行性。它的主要作用是大规模集成电路的计算机辅助设计。1
特点电子仿真平台因其简单形象的图标显示、清晰直观的操作界面、强大的电路功能仿真而成为首选的电子电路设计软件。使用电子仿真平台下进行实际电路设计在电子仿真平台环境下进行多次的电子电路设计结果表明,它具有以下3个特点:
1、与计算机高度融合,与键盘上的按键交互性非常好。在电子电路元件参数控制与修改上,可以用键盘上的大小写字母来控制;同时能发声的蜂鸣器可以通过计算机主板上的设备进行驱动,显示实际电路的声音
2、库里的元件种类丰富、数量无穷,在电子仿真平台环境下进行电路设计,元件的使用不再受数量限制,每个库里的元件种类都是由普通和特殊的构成,为设计者提供了非常充足的元件选择。
3、仿真优化电子电路设计方案,提高电路制作成功率。通过电路仿真功能,可以对设计的电路进行预设故障现象观察,通过对可能产生的故障进行分析和总结,更好的避免了在实际制作中出现问题,提高了电路制作的成功率。2
系统仿真步骤首先,针对实际系统建立模型。并对模型进行形式化处理,以得到计算机仿真所要求的数学模型。
第二步是仿真建模,即按照系统的特点及仿真的要求选择合适的算法。
第三步是程序设计,即用能在计算机上运行的程序来描述第一步建立的数学模型。
第四步是程序检验,也就是运行程序进行调试,当然,还要检验第二步选择仿真算法是否合理。
第五步是仿真实验,根据仿真的目的从多个角度进行实验,从而得到模型在各种情况下的仿真结果。
第六步是对仿真结果进行分析,这不但是对模型数据的处理,而且是对模型的可信性进行检验。1
计算机仿真技术定义计算机仿真技术就是根据真实系统的数学模型,以计算机为工具对系统进行实验研究的一种方法,通过在计算机上进行计算、分析、研究,获得真实系统的定量关系,实现对真实系统加深认识和理解,为系统设计、调试或管理提供所需的信息、数据和资料。
计算机仿真技术按所使用的计算机种类,可将计算机仿真技术分为:模拟计算机仿真、数字计算机仿真和数字模拟混合仿真,这三种形式的仿真技术具有各自不同的特点。1
发展随着复杂系统仿真应用需求的增加和计算机技术的迅猛发展,仿真体系结构面临新的挑战,这就使得先进的分布仿真体系结构成为建立行业仿真系统的关键。近十年来仿真系统的发展态势划分为三个阶段,即:
单机单系统仿真阶段研制高性能的专用仿真机;
分布交互式仿真阶段企图用通用机群构成分布式交互仿真系统;
高级结构仿真阶段根据仿真的需求,在通用机群的基础上,建立基于HLA结构的仿真系统。
美国ADI公司继80年代研制出两代专用仿真机AD10和AD100之后,为了迎合分布仿真发展,90年代推出了ADISIM系统。这是一个分布处理的仿真计算机系统。此后又相继出现了一些高性能仿真软件支撑环境,如MATRIXx、EASY5x等。分布交互仿真(DIS)的基础是DARPA和美国陆军在80年代共同研制的SIMNET。DIS由于采用消息广播机制,系统的可伸缩性和协同性不好;同时由于缺乏可靠的对象间通讯和适当的时间管理服务,不能满足未来大规模仿真的需求。综合仿真的最新发展是强调需要有自己的系统构架协议和通讯机制,以满足仿真的强实时性、可重用性、可交互性、互操作性、可伸缩性和协同性,它以96~97年颁布的HLA/RTI标准为标志。
我国的仿真技术十多年来也获得长足发展。继银河仿真Ⅰ型、银河仿真Ⅱ型计算机和超级小型仿真计算机之后,上海航天局研制的红外目标寻的制导导弹仿真系统,航天部一院十二所进行的长征二号捆绑式火箭全程仿真试验,都是分布式仿真的尝试。目前的多武器平台攻防对抗仿真,以及高性能的分布式电子对抗仿真,都是多种实体(飞机、导弹、雷达和火炮等)参加的综合仿真,对第三阶段的仿真计算机系统(软、硬件平台)提出了新的要求。3
需求及特点国内外研究表明,仿真应用需求从过去的设备仿真、单系统仿真,发展到今天的多系统仿真和复杂系统联合仿真;计算机仿真技术也从单一的纯数字仿真、半实物仿真、人回路仿真发展到集面向对象、客户/服务器、分布计算、多媒体、专家系统及虚拟现实等多种仿真手段为一体的综合仿真系统,其特点主要表现为分布性、异构性、互操作性/可重用性、强实时性和可交互性。
1 分布性
当今的仿真存在着一个特点,即各仿真子系统分布在不同的部门和越来越广阔的地区,要求能独立操控相距一定距离的群机系统,分布性已成为现代仿真应用环境的显著特征。分布式仿真的目的是通过互联网络来支持多个仿真应用合作完成同一项工作。分布计算模式提供一个与平台和地理位置无关的信息处理环境,从而降低了分布式应用系统开发的复杂性,提高了互操作性、可移植性和代码的可重用性。把CSCW技术运用到分布仿真的研究,将是未来仿真发展的重要趋势。
2 异构性
应用领域和分工的不同造成仿真系统天然的异构性。由于参与仿真的各实体充当的角色和效能参数不同,对各自仿真平台的需求也有所差异。例如飞行器仿真是属于空气动力学仿真系统,它是以解常微分方程为主体,数据不失真帧时间要求在1~2ms之间。而对于数据量大、功能相近的多个实体仿真最好进行向量计算。因此,可以采用各种配有面向问题仿真软件的高性能微机、工作站及并行机构成分布仿真计算机平台,而且各节点并非孤立,相互之间还有协同关系。
3 互操作性/可重用性
主要表现为,综合仿真强调仿真需要自己的系统构架协议和通讯机制。96年9月,负责建模与仿真主计划MSMP的美国国防部国防建模与仿真办公室(DMSO)正式公布了HLA文档,其目的是提高仿真应用的互操作性和可重用性。HLA的定义包括三个部分:规则集,HLA接口规范说明,对象模型样板OMT。HLA中将实现某种特定仿真目的的仿真系统称为联邦(federation)。联邦由若干交互的仿真应用和其它一些相关的应用(统称联邦成员federate)、RTI(runtimeinfrastructure,简称RTI)和联邦对象模型(OM)构成。联邦成员可视为由若干对象构成,成员之间的交互通过RTI提供的服务实现。
4 强实时性
所谓强实时任务,也称为强时限任务,要求该任务在时限之内完成,否则其结果将失去可用性。分布式实时仿真系统的关键技术有两个:一是网络的实时性,即如何保证网络传输时间是有界和可预测的。对于互联网络的需求着重于随机访问和任意两个处理机间建立联系。采用通用高速网、专用网或专线连接等是提高网络性能行之有效的方法。二是分布式系统的调度问题,调度策略对仿真平台的效率有着重大影响。调度策略又可分为动态调度和静态调度两种。显然具有非确定性计算模型的任务只能采用动态调度策略,而对于具有确定性计算模型的任务两种调度策略都适用。分布式交互仿真问题是非确定性计算模型,调度的目标是正确反映成员之间的协作关系,提高仿真平台的运行效率,保证任务的强实时性。
5交互性
人机交互技术是今后仿真技术发展的一个重要方向。高性能仿真系统应该具备三维可视化的能力,并提供仿真结果分析的可视手段。动态图象处理强调“实时”,即要求实时动态图象生成,逼真反映仿真对象的现状,以最少的控制输入参数来实施控制。3
车辆电子仿真平台网络结构综合车辆电子仿真平台用4台PC机作为网络节点,使用CAN总线连接4个节点构成网络。系统结构如图所示。其中1号PC机模拟主控端,2号PC机模拟驾驶员终端,3号PC机模拟车长终端,4号PC机模拟性能仿真终端。
工作原理仿真平台的4台PC机作为网络节点,既相互独立,又彼此进行信息交互。主控端对各终端信息进行分析、处理,并做出判断,下达命令。驾驶员、车长终端按主控端指令进行子终端系统的操作训练。同时,驾驶员终端与车长终端之间也存在信息传递:驾驶员把车辆行驶工况报告给车长,车长对驾驶员下达指挥命令,如左转、右转、加速、减速等。性能仿真终端运用Matlab软件对车辆综合电子系统的主要设备进行参数选择、故障设置等,并模拟出系统工作曲线,使系统定位故障准确、迅速,维修故障形象、直观。
系统终端的软件环境采用WindowsXP操作系统,用BorlandC++Builder6语言编写程序代码,完成对CAN控制器的操作,发送、接收报文的处理,纠错处理以及界面设计等工作。终端显示界面在重现实车界面功能的基础上,还添加了外部硬件功能模块,使系统功能全面化,完整化。采用C++Builder软件自带工具DatabaseDesktop建立数据库,对数据信息进行储存和管理。将数据库文件与工程文件存储在同一目录下,通过数据库组件即可实现数据的添加、删除、修改等。
主控端设计主控端程序分为3个基本模块:网络管理模块、子终端管理模块和通信服务模块。其结构如图所示。
网络管理模块的功能是:对CAN网络系统进行状态监测及故障识别,确保数据信息实时、准确传送。
子终端管理模块的功能是:系统工作参数的配置,如系统环境、车辆工况、各子终端的报警越限设置等;工作流程的设置,通过多媒体动画显示的方式指挥子终端系统的操作训练;外部数据源,运用实时数据库技术建立各子终端系统的数据库,同时实现数据的显示、更新、查询、统计及报表输出等。
通信服务模块的功能是:利用CAN卡及其函数库,实现与各子终端系统的网络通信,完成通信命令数据的编解码及特殊处理。
驾驶员终端设计驾驶员终端信息很多,但对于不同阶段驾驶员所关心的信息,所进行的操作是不同的。根据某型战车的任务特点,把车辆行驶分成4个工作阶段。根据不同阶段驾驶员关心的信息不同,采用虚拟仪表技术、多媒体技术等设计的3个不同显示界面是:(1)硬件仿真操作界面;(2)仪表配电板界面;(3)虚拟仪表显示界面。不同界面间可通过切换键进行切换。硬件仿真操作界面和仪表配电板界面分别如图所示。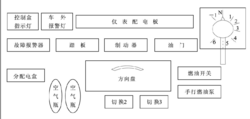
车长终端设计将车长终端外部设备(激光报警设备,车载卫星定位接收机、天线、电子罗盘)的数据源存储于主控端的数据库中,车长终端通过CAN总线从数据库获取所需数据,经过处理,将信息以直观的图形窗口方式显示出来。车长终端同时接收用户通过显示屏上的键盘输入的信息,并完成相应的操作。
车长终端软件功能如图所示。
主程序包括4大模块,用户可选择相应的工作方式进行有关操作,可执行系统不同的功能有:
1 作战指挥
该功能是系统在战时执行作战指挥控制的最常用方式,软件接收、处理和控制系统配备的各种电子设备,完成战场综合态势感知、信息共享,实施指挥控制及与上级和友邻的协同作战等功能。
2 模拟训练
该功能是在平时为操作使用人员进行训练而设计的,在此方式下系统仅启动通信设备进行车内、车间的互通、互连,启动设备模拟软件模拟设备的输入信息,进行相应的控制处理,使用模拟软件按照预先装入的想定,模拟部队的开进,从而实现系统的模拟训练。
3 系统管理
该功能是提供给系统的安装、维护、管理人员使用的,在软件安装成功后,对系统的运行环境进行配置,对系统运行过程中产生的数据进行管理,对系统连接的设备进行维护、测试和控制。
性能仿真终端设计运用Matlab中的Simulink实现仿真功能,Simulink是一个进行动态系统建模、仿真和综合分析的集成软件包。通过对模型进行参数设置,选择系统工况,即可模拟出各种工作曲线,让乘员不但可以了解平台仿真过程中具体环节的动态细节,还能了解各器件、各子系统间的信息交换,掌握各部分之间的交互影响。通过对设备模型随机故障的设定,可以模拟平台对各终端系统故障的监测与诊断。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国