

背景数据采集的意义
自然界中实时存在的绝大多数物理信号,都是在时域内,即时间与幅度坐标系内连续变化的模拟信号,通常称之为幅值的连续时间函数,例如声音、温度、气压等。模拟信号经传感器转化为模拟电信号后,其幅值、相位等仍是时间的连续函数,并可经模拟电路进行各种运算,如放大、相加、相乘等。但模拟电信号在传输、加工过程中波形会发生改变,易受外界噪声干扰,使信号丧失部分信息,且模拟信号不易存储,复现困难,这使人们越来越关注形式简单、抗干扰能力强、易于存储传输的数字信号。近年来,随着半导体、通信、多媒体等技术的飞速发展,数字计算机和数字信号处理器能对数字信号的处理能力大幅增加,电子技术的应用已然渗透到军事、民用领域的各个角落,其中,基于数字信号的电子系统在处理能力、可靠性、性价比、功耗和电路面积上具有很大优势,几乎所有信号处理、存储都以数字形式进行,这样,人们可将自然界中的物理量转化为可被计算机识别的二进制数字量,处理后再将其复现为模拟信号,实现模数信号的统一处理,信息处理效率得到显著提升。在这一过程中,数据采集是模拟信号与数字信号的桥梁,是解决模数信号转换问题的核心。数据采集及其相关技术手段现已成为信息科学中的重要研究方向,与传感器技术、信号处理技术和计算机技术一起构成了现代测试测量科学的基础。
并行数据采集的意义在震动、压力测试,医用、医疗仪器,电能质量测试等领域中,经常遇到诸如分布式传感器传回的多路并行数据、人体多项生理指标、多器件电能质量参数等被测量,它们通常处于中低频,且具有数量大、种类多、并行性强等特点,对采样速率要求不高,但要求所用数据采集系统拥有高分辨率、多通道、并行性好等性能,同时希望所采数据能被及时送交处理机处理。此外,并行数据采集类似于人类接收信息的模式,与人工智能等前沿科技有十分紧密的联系。
另外,并行数据处理是计算机与测试测量领域的重要研究内容,其处理数据的一般过程是,首先对于特定实际问题的某几方面参数进行大量的实时数据并行采集,将其抽象为数据库内的数据模型;其后利用计算机内的并行算法编程,将数据处理的过程转变为并行的数值计算过程,最后将计算结果翻译成处理实际数据的方法。创立应用并行数据处理的最大原因是这种处理方式能解决单个处理器的处理瓶颈,提高数据处理效率。可以很容易地看到,要并行数据处理,需要可进行并行编程计算的计算机和解释处理方式的并行算法,而基础是开发出可进行并行数据采集的硬件平台。同时,并行数据处理在解决大运算量、多参量的复杂问题上发挥了重要作用。作为并行数据处理的一项基础技术,并行数据采集技术能够协调系统中的多个模数转换设备和通道同时工作,一齐对被采信号进行数据采集,在震动、压力测试,医用、医疗仪器,电能质量测试等领域中展现了巨大价值。与传统的串行数据采集不同,并行数据采集方式在满足电子系统的功能需求之外,还可大幅提高系统的工作效率,从而提升系统性能,对实际的测试测量和信号处理工作有重要意义1。
数据采集系统基本组成如图1所示给出了一个典型的数据采集系统的基本组成的示意图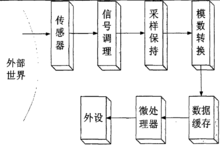 ,描述了它与外部世界的关系。
,描述了它与外部世界的关系。
(1)传感器的作用主要是把外部世界非电的物理量转变为模拟电量(如电压、电流或频率)。通常把传感器输出到A/D转换器输出的这一段信号通道称为模拟通道。理想的传感器能够将各种被测量转换为高输出电平的电量,提供零输出阻抗,具有良好的线性。
(2)信号调理通道主要完成了模拟信号的放大和滤波等功能。当传感器输出信号较小时,需要加以放大以满足A/D转换器的满量程输入范围。此外,某些传感器内阻比较大,输出功率较小,这样调理通道的放大器还起到了阻抗变化的作用来缓冲输入信号。传感器和电路中器件常会产生噪声,人为的发射源也会通过各种渠道使信号耦合上噪声,因此需要利用滤波电路来衰减噪声,以提高模拟输入信号的信噪比。
(3)采样保持电路的功能是跟踪模拟输入信号并保持这个值以备随后的处理。具体来说,A/D转换器完成一次转换需要一定的时间,而在转换期间希望A/D转换器输入端的模拟信号电压保持不变,才能保证正确的转换。当输入信号的频率较高时,就会产生较大的误差,为了防止这种误差的产生,必须在A/D转换器开始转换之前将信号的电平保持,转换之后又能跟踪输入信号的变化,保证较高的转换精度。
(4)A/D转换器是整个数据采集系统的核心,也是影响数据采集系统采样速率和精度的主要因素之一。模数转换器按工作原理可分为间接型A/D转换器、比较型A/D转换器(并行比较型,分级型)和∑-△型A/D转换器。数据采集系统的指标能否实现在很大程度上取决于与A/D转换电路的设计。高速的模数转换器内部一般都集成了采样保持器S/H和多路数据分配器,以保证采样的精度和降低后续存储器的要求。
(5)数据缓存电路存储A/D转化后的数据,特别是并行数据采集系统,采集量化后的数据速率非常高而且数量大,微处理系统无法对数据进行实时处理,因此需要存储器对数据进行缓存。
(6)微处理器是数据采集系统的控制中心,负责数据采集系统的管理和控制工作,对采集到的数据进行运算和处理,然后送到外部设备待处理或显示2。
并行数据采集方式分类根据应用场合的不同,并行数据采集的工作方式也不一样,可以分为独立性与交互式两种数据采集模式。
(1)独立性数据采集模式就是在采集过程中,并行工作的设备之间不存在任何联系,它们按照特定的采集速率独立工作。
(2)交互式数据采集模式是数据采集设备在工作过程中存在某些功能上、时序上的联系。比如,一个设备需要等待另一个设备完成某个操作后才能继续工作,这种情况称之为“同步”;而对于共享数据存储区的设备来说,一个设备在进行数据存储时另一个设备必须等待,每次只能有一个设备进行数据存储,这种情况称之为“互斥”。所以,这些具有相互联系的设备之间必须进行信息交互,才能保证系统数据采集的顺利进行3。
并行采样的方式并行采样技术是并行数据采集系统实现的基础。并行采样通常有两种方式。一种是采用并行时间交替采样的方式,另一种是采用延迟线的方式。
所谓并行时间交替采样,就采用多片A/D同时按照各自的采样时钟工作,通过控制时钟的相位,让A/D交替工作,然后再对得到的量化数据进行重组,得到高速采样数据,系统的采 样率为多片A/D采样率的总和。
样率为多片A/D采样率的总和。
采用延迟线:将被采集的模拟信号进行延时,将信号经过不同延时后依次送往不同的ADC进行并行采样,延迟时间为A/D转换器采样周期的一半。最后将数据进行重组,这样就可以在不对通道作任何改动的情况下提高了系统的采样率。
前者是经常采用的采样方式,而后者由于难以精确控制输入信号的时延,一般很少采用。下面详细介绍第一种方式:并行时间交替采样,这已形成一个比较成熟的理论,它是Black和Hodger于1980年提出的。这种方法不仅节省空间,并且为实现成倍增加现有高性能模数转换器的采样速率提供了一个简单可行的方法。多片ADC并行时间交替采样系统结构基本原理如图2所示。多相时钟发生器控制送往各个ADC采样时钟的相移,在多相时钟的作用下,各个ADC轮流采样转换,它们的采样时间之间保持一个固定的时间差。假设系统一共采用了n个ADC,各个ADC的采样时钟为f,则到达每个ADC的采样时钟的相位依次相差360/n度,这n个ADC并行采样之后系统的采样率可以达到nf。比如两个采样率为1GSPS的ADC并联,采样互补的两个时钟(相位相差180度)作为两个ADC的采样时钟,数据合并后就相当于一个采样率为2GSPS的ADC在工作2。
Lab VIEW中并行数据采集的实现步骤LabVlEW中基于队列和状态机的并行数据采集系统实现步骤如 下:
下:
(1)创建一个队列管理子Ⅵ,利用该Ⅵ来实现对各并行设备信息交互队列的创建及维护管理,编写的队列管理子VI图标见图3。
(2)为每个并行设备创建一个状态机模型,利用该状态机实现设备的初始化、信息交互、数据采集、数据处理、设备释放等操作3。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国