

简介
航天飞行训练模拟器用以构建与真实飞船一致的感知操作环境,用于航天员在地面环境下进行全飞行阶段的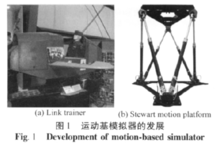 设备监视与飞船操作、正常飞行程序和故障程序训练,使航天员在正式执行任务前己经能够熟练掌握飞船驾驶的技能。世界上第一台飞行模拟器诞生于1929年,由美国人林克发明,称为“林克训练机”(图1),它的诞生使得人类可以在地面实验室进行安全而经济的飞行训练。
设备监视与飞船操作、正常飞行程序和故障程序训练,使航天员在正式执行任务前己经能够熟练掌握飞船驾驶的技能。世界上第一台飞行模拟器诞生于1929年,由美国人林克发明,称为“林克训练机”(图1),它的诞生使得人类可以在地面实验室进行安全而经济的飞行训练。
前苏联/俄罗斯、美国等国家从载人计划一开始,就建立了多种用于航天员训练的模拟器,为航天员顺利完成任务提供了有效的训练手段。航天飞行训练最初均以固定基模拟器为主。但由于航天器结构的不同,航天飞行训练在运动基模拟器的应用上出现了差异。从美国和俄罗斯航天飞行训练的情况来看,由于两者采用了不同的航天器—前者为航天飞机,后者为载人飞船,它们风格迥异的空气动力特性和飞行控制方式决定了两者所采用的飞行训练方式及设备也是必然有所区别的。以美国航天飞机的训练设备为例,在综合任务模拟中他们同时使用了固定基模拟器和运动基模拟器。前者用于任务及载荷训练和发射、返回及着陆训练;而运动基模拟器主要用来训练指令长和驾驶员在发射、返回和着陆等阶段的控制操作,也可以使全体乘员一起模拟航天飞机发射、上升、返回和着陆的过程,提供逼真的飞行动感环境。我国载人航天器采用的是飞船模式,2002年完成了第一台全任务固定基飞行训练模拟器的研制,随后根据飞船技术状态进行改造完成了SZ-5、SZ-6、SZ-7航天员训练与选拔任务,满足了任务的需要。
基本应用环境1965年,德国人Stewart提出使用六个作动器的伸缩来模拟飞行器六个自由度的运动,之后这种结构(图1)的模拟器被称为Stewart运动模拟器,由于其性能优越且易于控制,四十多年来得到了极大的发展,并成为运动基飞行训练模拟器的主流结构。现在世界上最大的3家专业飞行模拟器制造公司分别是加拿大的CAE,欧洲的Thales以及美国的FlightSafety,我国大部分民用的运动基飞行模拟器也是从这三家公司购买的。
对飞行模拟器的态度,早期的学者大多数都倾向于相信“越逼真越好”,而在之后不断的实践中,逐渐统一认为它取决于飞行器的特点和训练任务的需要,有些需要运动基模拟器,有些则不需要。1989年,Hall分析了飞行训练模拟器对运动基的需要及其对训练有利的各项因素,提出了几条具有一定逻辑性且相对合理的运动基模拟器应用环境描述:
1)所模拟的是相对不稳定的飞行器;
2)驾驶人员需要进行高幅值、高频率的手动控制;
3)控制活动和工作负荷应该同飞行器中一致或类似。
模拟器的用途运动基模拟器按照用途可分为训练模拟器和工程模拟器。前者可用于飞行员或航天员的训练,而后者则用于对飞行器各项性能的评估。
飞行器的类型运动基飞行模拟器被广泛用于各类的飞行器,包括民航客机,军用固定翼飞机,军用直升机。在具体应用中,需要考虑的问题是:对于不同的飞行器,何种性能的运动基模拟器可以满足要求[Ll在正常情况下,航天飞船的飞行动感介于民航客机和军用飞机之间:既没有民航客机飞行时要求的高平稳性,也没有达到军用战机高强度高难度的飞行动感。在应急情况下,航天员需要在极其不稳定的状态下对航天器进行干预,如自动控制系统失灵应急返回时,运动基模拟器的应用可以提高类似故障训练的训练效果。1
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国