

空速表
空速是飞行器相对周围空气的运动速度。空速表就是测量飞机空速的仪表。飞行员可以根据空速表的显示读数判断作用在飞机上的空气动力情况,进而正确地操纵飞机。通过空速还可以计算地速,从而确定已飞距离和待飞时间。常用的空速表有指示空速表、真实空速表以及组合式空速表。1
高度表气压式高度表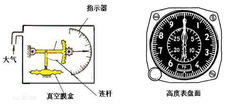 根据大气层的组成及特点,我们知道大气的静压Ps随着高度增加而减小。通过测量气压Ps,间接测量高度,就是气压式高度表的工作原理,这种高度表实质上是测量绝对压力的压力表。右图是气压式高度表的简单原理及盘面图。
根据大气层的组成及特点,我们知道大气的静压Ps随着高度增加而减小。通过测量气压Ps,间接测量高度,就是气压式高度表的工作原理,这种高度表实质上是测量绝对压力的压力表。右图是气压式高度表的简单原理及盘面图。
如图所示,将高度表壳密封,空气压力Ps由传压管送入高度表内腔。高度增加表内压力减小,置于表壳内的真空膜盒(内腔抽真空后密封)随之膨胀而产生变形,膜盒中心的位移经传动机构传送,变换和放大后,带动指针沿刻度面移动,指示出与气压Ps相对应的气压高度数值。
在盘面的下部,有个小窗口,其示数是基准面的气压值。可通过调整旋钮调节。测量标准气压高度时,窗口内的示值应为760(毫米水银柱)。当测量与机场的相对高度时,其示数是机场地面的气压值。2
无线电高度表无线电高度表是利用无线电波反射的原理工作的。飞机上装有无线电发射机及发射接收天线。测量时,发射机经发射天线向地面发射无线电波,接收机将先后接收到由发射机直接传来的电波和经地面反射后的回波进行比较,两束电波存在有时间差。如果电波在传送过程中没有受到干扰,时间差正比于被测的高度。测量出时间差,高度也就知道了。
 使用的无线电高度表有调频式和脉冲式两种类型。前者发射机发射的是调频式无线电波,电波的频率随时间周期性地变化,因此接收机所接收的两束电波时间差,直接转换成信号的频率差,测量频率差,即可得到真实高度。而后者发射机发射的是离散脉冲,需要测量发射脉冲与反射脉冲之间的时间差。
使用的无线电高度表有调频式和脉冲式两种类型。前者发射机发射的是调频式无线电波,电波的频率随时间周期性地变化,因此接收机所接收的两束电波时间差,直接转换成信号的频率差,测量频率差,即可得到真实高度。而后者发射机发射的是离散脉冲,需要测量发射脉冲与反射脉冲之间的时间差。
在高度小于1000米的情况下,无线电高度表的准确度优于气压式高度表。因此,在飞机起飞、进场着陆阶段,大部采用无线电高度测量飞机的离地高度。新设计的无线电高度表除指示被测高度外,还具有警戒高度的报警信号(声、光报警)和故障警告旗。下图是一个典型的无线电高度表指示器。
图中右下方的旋钮为警戒高度调整,驾驶员调定警戒高度后,当飞机在此高度附近时,高度表将发出报警信号,提醒驾驶员注意。当高度表测量系统产生故障时高度表警告旗即出现。3
陀螺地平仪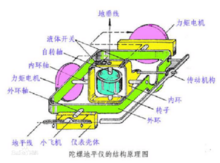 陀螺地平仪是利用三自由度陀螺仪的特性和摆的特性做成的陀螺仪表,用来测量飞机的姿态角。飞行员凭借陀螺地平仪的指示,才能保持飞机的正确姿态,完成飞行和作战任务。特别是在云中飞行或进行夜航时,飞行员看不见大地的地平线和地标,如不借助仪表,驾驶飞机就十分困难;而且,飞行员容易产生错觉,甚至可能造成机毁人亡的事故。由于飞行姿态对飞行的运动状态具有决定性的影响,对保证飞行安全也具有极大的重要性,因此,作为首要飞行仪表的陀螺地平仪通常都安装在飞机仪表板中间的最显眼位置上。在有些飞机上还加装了应急地平仪,以备主地平仪出现故障时使用。
陀螺地平仪是利用三自由度陀螺仪的特性和摆的特性做成的陀螺仪表,用来测量飞机的姿态角。飞行员凭借陀螺地平仪的指示,才能保持飞机的正确姿态,完成飞行和作战任务。特别是在云中飞行或进行夜航时,飞行员看不见大地的地平线和地标,如不借助仪表,驾驶飞机就十分困难;而且,飞行员容易产生错觉,甚至可能造成机毁人亡的事故。由于飞行姿态对飞行的运动状态具有决定性的影响,对保证飞行安全也具有极大的重要性,因此,作为首要飞行仪表的陀螺地平仪通常都安装在飞机仪表板中间的最显眼位置上。在有些飞机上还加装了应急地平仪,以备主地平仪出现故障时使用。
飞机的姿态角是指俯仰角和倾斜角。假如飞机上有一个地平面基准,当飞机抬头或低头时,飞机纵轴与这个地平面之间的夹角就是飞机的俯仰角。当飞机绕纵轴向左或向右转动时,飞机纵向对称平面绕纵轴转过的角度就是飞机的倾斜角。
要测得飞机的姿态角,关键是在飞机上建立一个地平面或地垂线基准。我们知道,摆能够自动寻找地垂线具有方向敏感性;但它受加速度干扰时会产生很大的误差,缺少方向稳定性。我们也知道三自由度陀螺仪的自转轴并不因加速度干扰而改变方向,具有方向稳定性;但它却不能自动寻找地垂线,没有方向敏感性。即使把自转轴调整到与地垂线重合,由于地球自转和飞机运动导致地垂线在惯性空间不断改变方向,而且陀螺漂移导致自转轴在惯性空间也不断改变方向,这就使得起初与地垂线重合的自转轴逐渐偏离地垂线。由此想到把摆和陀螺仪二者的优点结合在一起,即用摆敏感地垂线并对陀螺仪进行修正,使具有方向稳定性的自转轴获得方向敏感性,这样便可在飞机上建立一个精确而稳定的地垂线基准。
以三自由度陀螺仪为基础,加上修正装置,再装上指示机构,就可构成陀螺地平仪。若不装指示机构,而是装上信号传感器,则可构成垂直陀螺仪。4
航向陀螺仪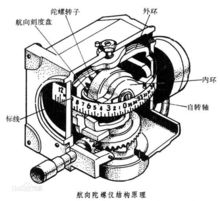 航向陀螺仪(directional gyroscope),利用陀螺特性测量飞机航向的飞行仪表。陀螺转子高速旋转时,其旋转轴具有方向稳定不变的特性。因此方位陀螺仪在飞机转弯时,虽然仪表壳体随着飞机转向,但陀螺转子仍稳定在一定方位上,航向刻度指出了飞机所转过的角度。由于飞机所在位置的地理北向随着地球自转和飞机的运动而不断地相对于惯性空间转动,所以需随时修正陀螺自转轴的指向,才能正确地测量飞机航向角。航向陀螺仪在长时间内测量航向的精度较低,故常用来测量飞机转弯时航向角的变化。
航向陀螺仪(directional gyroscope),利用陀螺特性测量飞机航向的飞行仪表。陀螺转子高速旋转时,其旋转轴具有方向稳定不变的特性。因此方位陀螺仪在飞机转弯时,虽然仪表壳体随着飞机转向,但陀螺转子仍稳定在一定方位上,航向刻度指出了飞机所转过的角度。由于飞机所在位置的地理北向随着地球自转和飞机的运动而不断地相对于惯性空间转动,所以需随时修正陀螺自转轴的指向,才能正确地测量飞机航向角。航向陀螺仪在长时间内测量航向的精度较低,故常用来测量飞机转弯时航向角的变化。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国