

基本概念离散系统
早在五十年代,由于数字计算机在工程和科学上应用的增加,离散控制系统的研究己经引起了人们的注意,当时的工作主要是应用z变换研究采样数据系统。近三十年来,离散控制系统的研究已经有了较大的发展。尤其是近几十年来,随着科学技术的高速发展,人类社会进入到信息化,工业技术发生了根本性变革,出现了一大批高新技术领域世界范围的微电子技术革命浪潮,极大地推动了微处理机和微型计算机在控制系统种的应用。由于数字计算机进行计算机时在时间上是离散的,因此当一个系统用数字计算机进行控制或用数字计算机模拟、分析、设计控制系统时,需要把时间变量考虑为离散变量,研究的系统需要考虑为离散系统,由于这些原因,近来离散控制系统的研究再次引起了控制界的特别重视,目前离散控制系统的分析与设计已成为控制理论的一个重要组成部分。
随着微型机的多功能性及可靠性的不断提高,加之其价格的日益下降,应用微型计算机进行控制和管理日益广泛。例如用小型机代替二次仪表对生产过程进行控制时,其不仅可以实现PID控制,还可以实现一些复杂控制。更进一步,还可以应用离散控制系统的理论和方法,设计更高级的反馈系统,以达到诸如最优控制、线性多变量控制、自适应控制等等。又如用微机对一个工厂、一个公司以至一个比较复杂的管理系统管理时,通过建立数学模型,利用离散系统的理论和方法进行分析与设计,可以得到令人满意的管理策略。由于数字计算机处理的只能时离散的数字信号,所以,不论它用于控制或用于管理,如果原来的信号时连续的,都需要将它离散化,转换成离散信号。这就是说,需要通过离散化把原来的连续控制系统转换成一个离散控制系统来处理。因此研究离散系统具有重要的现实意义。
动态系统动态系统是指系统状态随时间而变化的系统或者按确定性规律随时间演化的系统。
按确定性规律随时间演化的系统,又称动力学系统。动态系统理论来源于经典力学。美国数学家G.D.伯克霍夫发展了法国数学家H.庞加莱在天体力学和微分方程定性理论方面的研究,奠定了动力学系统理论的基础。动态系统的首要特征就是该系统由多种变量或参数构成,这些变量相互联系,并处在恒动之中。动态系统可以是城市的交通系统或森林的生态系统,也可以是一个言语社区。同时,二语学习者自身可视为一个动态系统,包括认知环境、社会环境以及社会政治环境、客观物质环境等。
动态系统的特点是:
①系统的状态变量是时间函数,即其状态变量随时间而变化。
②系统状况由其状态变量随时间变化的信息来来描述。
③状态变量的持续性。
研究现状在工程技术、经济、自然科学和社会科学等领域中,普遍存在着许多随时间而变化的复杂系统和非线性现象,如物价的波动、城市的扩展、天气的变化人口的增长等人们通常需要根据动态系统的观测数据建立合理的动态系统模型(动力学模型),为系统分析、设计以及对系统未来状态的预测提供依抵离散动态系统模型是一类非常重要的模型,但在建立模型的过程中,确定描述系统演化运动的动态方程组却十分困难传统的建模方法是凭直觉或经验事先假定一组动态方程的结构,然后采用数值方法确定假定方程中的参数,但其合理性、精确性差及计算的烦琐过程使传统方法的应用受到一定限制,针对非线性多维高次的复杂系统建模确定方程的结构非常困难。遗传规划(简称GP)是在遗传算法的基础上发展起来的。它可以将结构估计与参数估计结合在一起,能够在没有完整的模型结构信息的情况下,利用观测数据建立系统动态模型解决了遗传算法不能描述层次化问题及缺乏动态可变性的缺点,为人们提供了复杂系统建模的一种新思路和新方法,目前在动态系统建模方面得到越来越广泛地应用。遗传规划在离散动态系统建模中的应用,就是要解决离散动态系统的结构与关联函数的建模。1
系统描述设一个动态系统由n个有关联的状态变量所描述,在离散时间步上对该系统进行观测,从0-t时间步上的观测数据为:
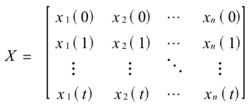
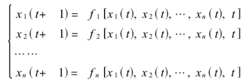
其中,状态变量间的关联关系可以表示为如下动态方程组,xi(t)表示第i个状态变量在t时间步上的状态值。
记
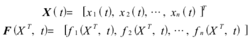
则上式变换成:
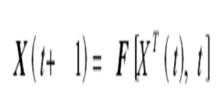
离散动态系统建模就是求上式中的F,使得误差最小。
鲁棒控制概况当控制系统中的某个物理量随时间变化的规律不能用连续函数描述时,只在离散的时刻有数值,则这样的系统称为离散时间系统。
随着计算机科学、脉冲技术、微处理器及数字元部件的发展,在生物、生态、航空、航天、经济以及工程控制中的大量系统都需要用离散时间系统来描述。当连续时间系统在利用计算机对其进行分析和仿真时,也需将其离散化,然后再进行处理。
随着系统理论研究领域的扩大和计算机技术的广泛普及应用,离散控制系统理论得到迅速发展, 成为控制理论的重要组成部分。 离散系统理论在自动控制工程、通信、雷达技术、生物学、电力系统和核物理等领域发挥着重要的作用。
离散系统与连续系统的描述上有着本质的不同,但在分析研究方面又有着相似性,在连续时间续系统中的许多概念和研究方法,也可以推广并应用于离散系统中。
在控制领域及各种工业生产过程中的多数系统,一般都难以建立精确的数学模型,有时即使得到了被控对象精确的数学模型,可是往往都是十分复杂的,利用已有的控制技术条件是难以处理的,因而需要对复杂的系统进行简化处理;随着在生产过程中元器件的磨损与老化,使得被控对象的性能也会发生变化,这就导致了我们所建立的数学模型和实际的被控对象之间存在着一定的偏差和不确定性,再加上现实生活中环境及各种条件的复杂与多样,即存在着很多不确定的因素。因此研究具有不确定性的系统也具有重要的现实意义。
控制系统的鲁棒性是指控制系统在某种类型的扰动作用下,包括自身模型的扰动下,系统某个性能指标保持不变的能力。系统具有良好的鲁棒性是系统正常工作的保障。
稳定问题追溯至1981年,中国学者邓聚龙教授首创了灰色系统理论,在国际上引起了极大重视,并逐渐发展成为最常用的一种不确定系统的研究方法。研究灰色离散系统的渐近稳定性,可转化为区间矩阵的离散稳定性。对于这一领域的研究,取得了一些成果,周朝顺、邓聚龙(1988)利用一般离散系统的Lyapunov方程给出了灰色离散系统的稳定性的充分判据,从而使灰色连续控制系统的研究扩展到了灰色离散系统;彭晓林、罗晓(1991)提出了区间矩阵离散稳定性的概念,并结合矩阵理论方法给出了灰色离散系统稳定与不稳定的代数判据,并将其一些结论应用到区间矩阵的连续上去;黄廷祝等(1999)用特殊矩阵分析方法和技术,用矩阵的元素获得了该系统渐近稳定的简单实用的充分条件,较以往的结果有较小的保守性,并使得特殊矩阵理论在其上得到充分的运用,许多己有的好的结论都可以转化过来;韩金舫等(2004)运用矩阵特征值分析技巧给出了一般区间矩阵及离散动态系统稳定、不稳定和混合稳定的简捷判据.其中包含了充分条件,必要条件与充要条件,并修正了彭晓林的某些主要结论;刘建州、张月朗和方庆霞等(2007)用特殊矩阵分析方法得到了该系统渐近稳定的充分判据,推广了前人的结果。
上述离散动态系统的不稳定性问题也可化为区间矩阵的不稳定性问题。彭晓林,罗晓(1991)提出了区间矩阵的不稳定性和离散动态系统的不稳定性概念。对于离散动态系统的不稳定性问题,彭晓林,罗晓结合矩阵理论和Gersehgorin圆盘定理给出了一些不稳定的代数判据。韩金舫等(2004)在修正了彭晓林的某些结论后,运用矩阵特征值分析技巧得到了一般区间矩阵及离散动态系统不稳定的判据,并提出了区间矩阵混合稳定和离散动态系统混合稳定的概念。2
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国