

研究现状
从控制系统的本质上来讲,导弹的制导问题可以看成是对空中飞行的导弹质心进行位置控制的问题,导弹的控制问题可以看成是对空中飞行的导弹姿态、法向过载等动力学变量的稳定和控制问题,这些问题既可以用经典控制理论也可以用现代控制理论来解决。下面主要介绍几种控制系统设计理论,这些理论在导弹的工程设计上都得到了成功的应用。其中包括频率响应校正方法、PID控制等经典控制理论,以及最优传递函数设计法、极点配置方法、变结构控制等现代控制理论。
频率响应校正方法
频率响应校正方法就是在频域内对现行定常控制系统进行校正的方法。所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性能指标。
在频域内进行系统设计,是一种间接设计方法,因为设计结果满足的是一些频域指标,而不是时域指标。然而,在频域内进行设计又是一种简便的方法,在伯德(Bode)图上虽然不能严格定量地给出系统的动态特性,但却能方便的根据频域指标确定校正装置的参数,特别是对己校正系统的高频特性有要求时,采用频域法校正较其他方法更为方便。
按照校正装置在系统中的连接方式,控制系统校正方式可分为串联校正、反馈校正、前馈校正和复合校正四种。目前工程实践中常用的有三种校正方法,即串联校正、反馈校正和复合校正。
PID控制
控制工程界中广泛采用的一种控制器是PID控制器,也称三项控制器。其传递函数包括一个比例项、一个积分项和一个微分项。
PID控制器在工程中得到了广泛的应用,这一方面是由于PID控制器能在不同的工作条件下保持较好的工作性能,一般说来,当受控对象只有1个或2个极点(或可作2阶近似)时,PID控制器对减小系统的稳态误差和改善系统瞬态性能,效果特别明显。另一方面也是由于它们功能简单,便于使用。
为实现这样的控制器,必须确定的3个参数为:比例增益、积分增益和微分增益。而PID控制器的3个参数选择本质上是在三维空间搜索的问题。三维搜索空间的不同点对应于PID控制器的不同参数,因此,通过选择参数空间的不同点,就可以获得时间一输入的不同系统响应(例如阶跃响应)。几种常用的PID参数确定方法有:临界比例度法;响应曲线法;PID归一参数的整定法;根轨迹法;ITAE设计法。
ITAE最优传递函数设计法
对一个阶次较低的控制系统的动态品质,可以用超调量、阻尼以及调节时间等参数来衡量。而对一个阶次较高的控制系统无法确定系统解与上述三项指标的显函数。因此,在工程上常用系统的瞬时输出误差的泛函指标来表示控制系统品质的优劣。输出误差的泛函可取为输出误差的积分、输出误差平方的积分等几种,在工程上用的较多的即ITAE泛函指标,其中I一积分,T一时间,A一绝对值,E一误差。
ITAE最优传递函数设计的基本思路是采用优化方法,找出能使目标函数达到最小值时,所对应的系统闭环传递函数,即最优传递函数,在通过补偿措施,使待设计系统的闭环传递函数等于最优传递函数,这就是最优传递函数设计方法。
极点配置
一个系统的性能和它的极点位置密切相关,因此采用极点配置设计控制系统在工程上广泛应用。其基本思路是引入状态反馈阵使系统的特征多项式与理想系统的特征多项式相等,即把系统的极点配置在理想的位置。
利用极点配置设计控制系统需要解决两个问题:一是受控系统必须满足极点可配置的条件;二是确定状态反馈增益阵K的算法。
极点可配置条件为受控系统完全能控。常用的极点配置算法有两种:状态方程空间极点配置法;传递函数阵的极点配置法。
变结构控制
广义地说,变结构控制就是在控制过程中,系统的结构(或模型)可发生变化的系统。而我们常说的变结构控制是指系统按照给定的切换函数,系统的控制信号发生改变的一种控制方式,也称为滑动模态控制。
这是一种相对成熟的非线性控制器综合技术,它适合于线性系统和非线性系统、连续和离散系统、确定性和不确定性系统、集中参数和分布参数系统、同步与时滞系统,适用的控制任务包括镇定、跟踪等。
变结构控制的突出特点在于:当系统状态处于滑动运动时,具有对参数摄动的不变性和对外部干扰的鲁棒性。很重要的一点是这种滑动运动是通过变结构控制器中理想的开关特性来实现的。由于时间上的延迟和空间上的滞后等,会是滑动运动呈现抖振现象。对任一变结构控制系统,往往要经过三种研究:理论分析、计算机仿真和实物试验。1
设计要求作战武器在作战过程中必须实现发射、搜寻目标并对目标进行识别、跟踪、拦截和毁伤等工作,随着航天技术的快速发展,火箭弹、巡航导弹等各种用途的制导武器不断涌现。所谓制导武器就是按照特定的基准选择航行路线,自动控制和导引对目标进行攻击的武器。它们可以是天基的、空基的、陆基的或海基的。
实现制导武器的高精度,就要求制导系统精度高、稳定性好,能够适应高温、高压等多种复杂的外界环境。与导弹不同,火箭弹是一种高空域、速度变化范围宽的高动态制导弹药,对其旋转姿态的测量及其重要。火箭弹一般用于攻击固定目标,飞行弹道相对固定,其运动变化规律是己知的,因此,制导控制系统相对简单,制导控制系统的设计除了要保证动态参数的鲁棒性和精度要求,还要保证整个有控飞行过程中的稳定性和可控性。
制导方式制导系统是实现将战斗部导向目标提高命中精度的关键部分,在很大程度上决定着作战武器的战术技术性能,特别是制导精度和杀伤概率。它由导航系统和控制系统组成。制导系统按指令形成方式分为几种:2
自主式制导方式
自主制导是根据发射点和目标的位置,拟定一条理想预定弹道。飞行中通过弹上的制导设备,测出弹体相对理想弹道的偏差形成控制信号。弹发射后,弹、发射点、目标三者没有直接的信息联系,命中精度等信息完全由弹上制导设备决定,不依赖于目标,一切均按发射前给它安排好的程序导向目标。方案制导、天文制导、地图匹配制导和GPS制导都属于自主式制导。
遥控式制导方式
遥控制导的导引系统的全部或一部分控制信号由制导站产生并传送给弹上接收设备,将战斗部导向目标或预定区域。制导过程中,目标、弹体、制导站的运动学关系由目标、导弹的位置和导引方法确定。导引方法使弹体按预先选定的空间运动规律飞向目标。遥控制导又可分为驾束制导和遥控指令制导。如雷达驾束制导、激光驾束制导和电视指令制导、光电指令制导等。
寻的式制导方式
寻的制导是利用装在弹上的导引头接收目标辐射或反射的某种能量,确定目标和导弹的相对位置在弹上形成控制信号,自动将导弹导向目标的制导。寻的制导能够实现目标识别是精确制导的主要体制。其中比较先进的导引手段有毫米波制导、激光制导红外点源制导等。毫米波制导为美国和欧洲国家寻的制导的研究主流。激光制导是俄罗斯的研究主流。
复合制导方式
复合制导系统就是各类制导系统的有机组合,它是一种高制导精度度制导体制,己成为制导技术发展的重要趋势。从本质上讲,每种制导技术都有自己其独特的优点和缺点,组合系统可以充分发挥各个子系统的优点,互相取长补短从而达到精确制的目的。
制导系统的组成制导系统一般由导引系统和控制系统两部分构成。它们敏感弹丸自身在控制和干扰作用下的运动状态变化,并作出相应的反应,通过控制指令使舵面偏转从而操纵弹丸朝预置弹道飞行。
为了实现火箭弹的自动飞行,必须通过弹载控制系统构成回路。根据飞行任务的不同,可以组成舵回路、稳定回路和制导回路等各种不同的回路。
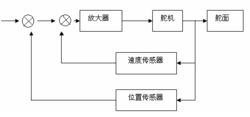
舵回路
舵回路是伺服机构,其工作原理主要是通过控制系统输入信号的大小与极性形成控制指令从而控制舵面,使之产生相应的舵偏角。图中设置的速度传感器是为了增大舵回路的阻尼,起到改善动态性能的作用。舵回路由放大器、舵机及反馈元件组成,如图所示。
稳定回路
放大计算装置、敏感元件以及舵回路组成自动驾驶仪。自动驾驶仪与弹体组成回路,即稳定回路。稳定回路如图所示。
稳定回路是制导系统的主要组成部分。其基本任务是确保弹丸在飞行中具有良好的稳定性和可操纵型。
稳定控制系统把弹体作为被控制对象,当转动控制面在操纵控制发动机和改变推力矢量时,弹体按照要求俯仰或航向机动,如果弹体上装有惯导,可以对伺服机构形成附加反馈,以修正弹体运动。

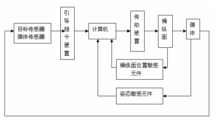
制导回路
事实上,在弹丸发射后的飞行过程中,制导系统将不断地测量其实际运动与导引律确定的理想运动之间的偏差,据此偏差的大小和方向形成控制指令,通过稳定控制系统形成控制力修正飞行轨迹,因此,制导系统是实现将火箭弹导向目标提高命中精度的关键部分。制导回路如图所示。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国