

罗兰系统介绍
原来LORAN是一种昂贵的系统,需要一个阴极射线管(CRT)显示器。这对军事和大型商业用户的使用有限。使用从未普遍存在,而在20世纪50年代新的接收机可用的同时,同样改进的电子产品也带来了更高精度的新系统。美国海军开始开发Loran-B,提供了几十英尺的精度,但遇到了重大的技术问题。美国空军处理了一个不同的概念,称为“海伦”,海军接管了罗兰C。 Loran-C提供比LORAN更长的范围和数百英尺的精度。 1958年,美国海岸警卫队接管了这两个系统的使用。
尽管Loran-C的表现大大提高,LORAN(现称为Loran-A)(或“标准LORAN”)在此期间将会更受欢迎。这主要是由于海军公布的大量剩余的罗兰A装甲,因为船只和飞机用Loran-C替代了它们的装备。 20世纪80年代广泛引入廉价的微电子技术,导致Loran-C接收机价格大幅下降,而Loran-A的使用开始迅速下降。从20世纪70年代开始,罗兰A被拆除;直到一九八○年,直到一九八五年,直到一九八五年,直到一九九七年五月九日为止,日本的连锁店一直保持在北美,直到一九九七年五月,中国的连锁店在二零零零年仍然活跃起来。
Loran-A使用与业余无线电160米频带相同的频率,无线电操作员在严格的规则下以较低的功率水平运行;根据他们的位置和到岸的距离,美国运营商在白天最多限制在200到500瓦,晚上则是50到200瓦。
发展历史切换到远程角色的决定意味着不需要Gee系统的高精度,这大大减少了解决时序问题的需要。这种目的的改变也要求使用较低的频率,这可以在夜间反射电离层,从而提供超视距的操作。最初选择两个频段,夜间使用1.85和1.95 MHz(160米)和7.5 MHz(40米)。早期接收器上标记为“HF”的7.5 MHz从未在操作中使用。
在1942年中期,电讯研究机构(TRE)Gee系统的首席开发人员罗伯特·皮皮(Robert Dippy)被派往美国工作了八个月,帮助LORAN发展。当时这个项目主要是由美国海军上尉哈丁主持,他们完全集中在船上。 Dippy说服他们,空降版绝对是可能的,导致美军空军的兴趣。海军对这一轮事件不满意。 Dippy还提出了一些在实践中将非常有用的简单变化。其中,他直接要求机载LORAN接收机在物理上类似于Gee接收机,从而可以通过更换接收机单元将其换成服务。这将证明非常有用;澳大利亚运输司令部的飞机可以在往返澳大利亚的剧院时交换接收机。 Dippy还设计了地面站定时设备。
在这个时候,这个项目是由美国海岸警卫队和加拿大皇家海军加入的。这个项目目前仍然是最大的秘密,而且很少有实际的信息,特别是与海岸警卫队。加拿大联络是必需的,因为这些驻地的理想选址将需要加拿大海上省份的不同地点的几个车站。新斯科舍省的一个地点被证明是一场战斗;这个网站是由一位渔夫拥有的,他的霸气绝伦的妻子死了,与有罪的海军男子有任何关系。当J.A.的选址委员会Waldschmitt和Lt. Cdmr。阿列耶夫与丈夫讨论这个问题,第三名访客抵达,他提供男子卷烟。他们拒绝了,女主人问他们是否喝酒。当他们说没有的时候,这片土地很快得到保护。
测量方法原来的机载接收机是1943年的AN / APN-4机组,与英国的两件式Gee机身完全相同,可以轻松与这些机组互换。显示器的主机还安装了大多数控件。一般操作从9个站之一开始,标记为0到8,并将扫描速度设置为1,最低设置。然后,操作者将使用强度和聚焦控制来微调信号并提供清晰的显示。
在最低的扫描速度下,系统还产生了一个送入显示器的本地信号,产生了一个清晰定义的“基座”,沿着两条轨迹显示出一个矩形。来自电台的放大信号也将出现在显示器上,并在时间上高度压缩,使其显示为一系列尖峰(闪烁)。随着信号的重复,这些尖峰在显示器的宽度上出现了很多次。因为显示被设置为以选定的电台对的脉冲重复频率进行扫描,所以该区域中不同重复频率的其他电台将在显示器上移动,而所选择的电台将保持静止。
使用“左右”开关,操作者将移动上基座,直到其中一个信号尖峰位于其中心,然后使用粗略和精细的延迟控制将基座移动到下部轨迹上以居中。一旦完成,系统设置为扫描速度2,这加快了轨迹,使得由基座概述的部分填满了整个轨迹。以扫描速度3重复该过程,此时在屏幕上只有信号的选定部分可见。转向扫描速度4没有改变时序,而是将信号叠加在一条迹线上,以便最终调谐可以使用增益和放大器平衡控制。目标是完美地对准两条痕迹。
此时测量开始。操作员切换到扫描速度5,返回到具有两条独立迹线的显示器,信号反转并以较低的扫描速度运行,从而在迹线上出现多次重复信号。混合在信号中的是在时基发生器中产生的电子秤,导致一系列小点出现在现在反转的原始信号上。在5个设置中,刻度上的点表示10微秒的差异,操作员测量位置之间的距离。在50微秒时重复设置6,再次以500微秒设置7。然后将这些设置中的每一个测量的差值相加,以产生两个信号之间的总延迟。然后,对于第二主从设备重复该整个过程,通常是相同链路的第二组,但不全是。
接收机单元随着时间的推移而大大改善AN / APN-4被1945年的AN / APN-9快速取代,这是一个综合接收机和显示重量减轻的一体机。3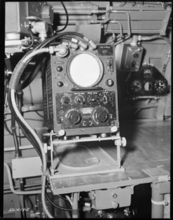
量程和精度白天,电离层只能弱反射短波信号,LORAN可以使用地面波500-700海里(930-1,300公里)。晚上,这些信号被抑制,范围降至350-500海里(650-930公里)。在晚上,天空对测量有用,将有效范围扩展到1,200-1,400海里(2,200-2,600公里)。
在长距离范围内,双曲线近似从基线中心辐射的直线。当考虑来自单个链路的两个这样的信号时,与该范围相比,所产生的线路图形变得越来越平行,因为基线距离变小。因此,在短距离处,线以接近90度的角度交叉,并且该角度随着范围而稳定地减小。由于固定的精度取决于交叉角度,并且所有双曲线导航系统随着距离的增加越来越不准确。
此外,复杂的一系列接收到的信号使LORAN信号的读取困难,需要一些解释。准确度更多是信号质量和操作员体验的问题,而不是设备或信号的任何基本限制。表达准确性的唯一方法是在实践中进行测量;从日本到天宁岛的航线的平均精度为1,400英里(2300公里),距离是28英里(45公里),为2%。4
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国