

背景
近几年,微电网概念备受关注,被视为利用分布式能源的最佳途径。1根据标准IEEE 1547.4,微电网从概念上讲, 一般是指由分布式资源(distributed resource,DR)和本地负荷组成的电气上互联、控制上协调运行,具有自我控制、保护和管理的小型发配电系统。DR 一般包括分布式发电(distributed generator,DG)和分布式储能(distributedstorage,DS),或者两者的组合。根据DR 系统接入微电网的方式,其可分为旋转电机接口和变流器接口2 种形式。其中接口变流器常采用电压源变流器(voltage source converter,VSC),其控制策略常可分为电压控制模式(voltage controlled mode,VCM)和电流控制模式(current controlled mode,CCM)。在分布式多变流器型微电网中,为最大化能源利用效率,DG 中的可再生能源如光伏发电、风力发电系统接口变流器的控制模式一般采用CCM,并根据最大功率跟踪算法产生功率指令,且常运行于单位功率因数。而DS 可在微电网孤岛运行工况下提供供需功率平衡和电压支撑,控制模式一般采用VCM。基于此,微电网处于孤岛运行工况下,系统内的无功需求将由DS 系统提供。这样,在变流器视在功率一定的情况下,微电网系统内无功需求越大时,则DS 对电源与负荷之间有功供需平衡的调节能力将越弱。
另一方面,随着分布式发电技术的发展,国内外DG 和微电网并网标准开始要求可再生能源具备无功控制和电压调节能力,允许DG 参与公共连接点(point of common coupling,PCC)电压调节。
因此,这些DG 将可看成微电网系统内的分布式无功功率补偿装置。2
基于此,国内外学者开始探讨利用这些分布式无功补偿装置辅助PCC 点电压调节的控制研究。其中针对变流器无功控制策略的研究较多,主要有:恒无功功率Q 控制、恒功率因数cosφ 控制、基于有功输出P 的cosφ(P)控制、基于并网点电压幅值U 的Q(U)控制策略及基于并网点电压幅值与有功出力的Q(U,P)等。但研究大多集中在DG 自身和接口变流器的无功功率控制上。很少从系统(微电网)层面上来协调整个微电网系统内的无功功率潮流。
多台VSC 并联运行时,其控制方法有主从控制、集中控制、平均负载分配等基于有互联线的控制方法,这类方法以高速数字通信或模拟信号形式实现对负载功率的分配,虽然能够得到较好的负载分配效果,但是降低了系统的灵活性与可靠性。针对该问题,基于下垂控制的无互联线方法被广泛应用于VCM-VSC 中,其仅依赖变流器的本地信息,通过预设的下垂曲线来分配负载功率,达到了较好的功率分配效果。然而该方案很难直接应用于基于CCM-VSC 控制的DR 上。
基于以上分析,从系统层面出发,提出一种分布式多变流器型微电网无互联线潮流控制方法。该方法利用微电网系统内所有潜在的分布式无功补偿源提供负荷所需无功,以期减小储能系统功率调节压力,实现系统潮流合理分配。
首先对微电网系统进行建模。针对VCM-VSC 和CCM-VSC 控制特点,提出了适用于CCM-VSC 的倒下垂控制来实现CCM-VSC 间的功率分配。通过合理设置CCM-VSC 倒下垂系数与VCM-VSC 下垂系数实现潮流在基于这2 种接口变流器的DR 间的合理分配。其次,对功率分配精度进行分析,给出影响功率分配精度的因素。为改善VCM-VSC 无功分配的精度和控制稳定性,VCM-VSC 常采用虚拟阻抗控制, 其将影响无功在VCM-VSC 和CCM-VSC 间的分配。为了解决该问题,提出虚拟阻抗与自适应空载电压补偿相结合的方法来实现潮流在VCM-VSC 和CCM-VSC 间精确分配。2
微电网系统建模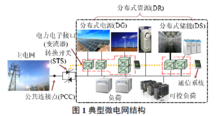 典型的微电网结构如图所示,根据转换开关状态的不同,微电网可运行于并网或孤岛模式。分布式多变流器型微电网系统以基于变流器接口的DR 系统为主导,本文重点对此展开研究。根据戴维宁和诺顿定理,接口为VCM-VSC 的DR 系统可等效为电压源UV 和阻抗zv 串联的电路,而接口为CCM-VSC 的DR 系统则可以等效为电流源IC与阻抗zC并联的电路。因此,图1可简化为如图2所示的等效电路,其中,n、m 分别表示微电网系统内VCM-VSC 和CCM-VSC 台数,不同VCM-VSC
典型的微电网结构如图所示,根据转换开关状态的不同,微电网可运行于并网或孤岛模式。分布式多变流器型微电网系统以基于变流器接口的DR 系统为主导,本文重点对此展开研究。根据戴维宁和诺顿定理,接口为VCM-VSC 的DR 系统可等效为电压源UV 和阻抗zv 串联的电路,而接口为CCM-VSC 的DR 系统则可以等效为电流源IC与阻抗zC并联的电路。因此,图1可简化为如图2所示的等效电路,其中,n、m 分别表示微电网系统内VCM-VSC 和CCM-VSC 台数,不同VCM-VSC 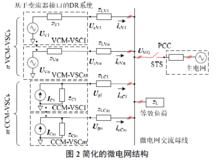 和CCM-VSC 的相关变量用数字下标加以区分;zLV 为VCM-VSC到PCC点等效线路阻抗(包含VCM-VSC滤波器中网侧电感);zLC为CCM-VSC 电压采样点到PCC 点的等效阻抗;UcV 表示VCM-VSC 电压矢量;Ug 表示CCM-VSC 采样点电压矢量;ioV、ioC分别为VCM-VSC和CCM-VSC输出电流矢量;UMG表示微电网母线电压矢量。2
和CCM-VSC 的相关变量用数字下标加以区分;zLV 为VCM-VSC到PCC点等效线路阻抗(包含VCM-VSC滤波器中网侧电感);zLC为CCM-VSC 电压采样点到PCC 点的等效阻抗;UcV 表示VCM-VSC 电压矢量;Ug 表示CCM-VSC 采样点电压矢量;ioV、ioC分别为VCM-VSC和CCM-VSC输出电流矢量;UMG表示微电网母线电压矢量。2
无互联线潮流控制针对VCM-VSC 和CCM-VSC 控制特点,研究适用于这2 种接口变流器的无互联线潮流控制,以期实现潮流在基于这2 种接口变流器的DR 间的合理分配。
1、适用于VCM-VSC 的下垂控制
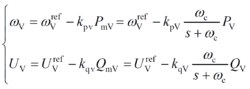
假设线路阻抗为感性(目前VSC 常采用LCL 滤波器,因为网侧电感的存在,假设一般成立或者可通过虚拟阻抗的设计来保证),VCM-VSC 常采用P-ω、Q-U 下垂控制来实现VCM-VSC 之间的有功
与无功功率分配。其控制方程为:
式中ωV、UV, 、
、 ,kpv、kqv,PV、QV,PmV、QmV,ωc 分别为输出角频率和相电压幅值、空载角频率和电压幅值、角频率和电压下垂增益、滤波前后有功功率和无功功率以及滤波器截止角频率。
,kpv、kqv,PV、QV,PmV、QmV,ωc 分别为输出角频率和相电压幅值、空载角频率和电压幅值、角频率和电压下垂增益、滤波前后有功功率和无功功率以及滤波器截止角频率。
稳态时,微电网系统工作于同一频率,忽略线路阻抗压降,则所有VCM-VSC 具有同一ωV、UV。若、一致,则:
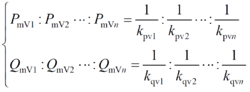
式中下标数字含义同图2。
可见,合理设置下垂系数,即可实现有功与无功功率的按需分配。常采用按DR 系统容量设置下垂系数。且下垂系数需满足以下条件:
式中:Δω 和ΔU 分别为系统允许的最大角频率和电压幅值偏差;PmaxV 和QmaxV 分别为每个单元允许输出的最大有功和无功功率值。2
2、适用于CCM-VSC 的倒下垂控制
基于 VCM-VSC 的下垂控制思想,适用于CCM-VSC 的倒下垂控制方法来实现CCM-VSC 之间的有功与无功功率分配。该类CCM-VSC 分为2 种形式:
1)采用ω-P、U-Q 倒下垂控制。
该类方法可应用于CCM-VSC 有功和无功功率调节能力不受DR 系统一次资源(如光伏、风电系统)环境条件的限制,如可再生能源过剩,DR 处于限功率运行工况,可以在限定的功率范围内自由调配的情况。该方法控制方程为
式中ωg、Ug, 、
、 ,kpc、kqc,PC、QC 分别为CCM-VSC 变流器网侧电压采样点母线电压角频率和幅值、空载角频率和电压幅值、角频率和电压倒下垂增益、有功功率和无功功率指令。
,kpc、kqc,PC、QC 分别为CCM-VSC 变流器网侧电压采样点母线电压角频率和幅值、空载角频率和电压幅值、角频率和电压倒下垂增益、有功功率和无功功率指令。
稳态时,微电网系统工作于同一频率,忽略线路压降,则CCM-VSC 检测的网侧母线电压约等于微电网交流母线电压,若 、 一致,则有

式中下标数字含义同图2。
可见,合理设置倒下垂系数,即可实现有功与无功功率按需分配。
针对同时含有VCM-VSC 和CCM-VSC 的微电网,稳态时系统工作于同一角频率,即ωg=ωV。忽略线路阻抗压降,则理想工况下,有Ug=UV 成立。若需实现同等容量的VCM-VSC 和CCM-VSC 均载分配,则只需预设 、
、 、kpvkpc=1 且kqvkqc=1 即可,其中,上标ref 的含义是参考值。则由上述可得,此时PmV=PC 且QmV=QC。
、kpvkpc=1 且kqvkqc=1 即可,其中,上标ref 的含义是参考值。则由上述可得,此时PmV=PC 且QmV=QC。
2)有功功率按照DR 一次资源特性分配,无功功率按照剩余容量倒下垂控制运行。当CCM-VSC 用于可再生能源时,为了最大化能源利用,常采用最大功率点跟踪控制。因此有功功率输出受限于当前DR 系统一次资源。同时,在视在功率一定的情况下,该系统当前具有的无功储备也随着有功功率的变化而变化。令SC 为系统额定视在功率,PMPPT 为系统当前最大功率点,则DR系统的无功储备为:2
功率分配精度分析及改善由于稳态时,系统工作于同一角频率,所以有功功率分配精度较高。然而由于线路压降,各节点电压幅值略有差异,从而导致无功功率不能按照需求精确分配。将重点针对该问题进行分析并提出改善方法。
1、改善VCM-VSC 分配精度的虚拟阻抗控制
VCM-VSC 通过内环控制器实现对电压指令的跟踪,其内环控制器参数与戴维宁电路等效电压源矢量和串联阻抗关系为:
式中:UVref 为下垂控制给出的电压指令;GcV 为内环控制器增益;zcV 为控制器闭环等效阻抗。
由图2可知,微电网母线电压为:

若不采用虚拟阻抗,内环控制器的设计常使GcV 和zcV 在基波角频率点的值分别约为1 和0。
因此,上式可以简化为:

由于各分布式DR 系统到PCC 点距离不同,则等效的线路阻抗zLV 难免有差异。由上式可知,若设置所有VCM-VSC 的UVref 相等,则会导致输出电流的差异,其差值取决于线路阻抗。
当2 台VCM-VSC 下垂系数一致时,2 台变流器无功差值QmVdif 为:
可见,无功功率差值取决于下垂系数、空载电压指令差值和实际因为线路阻抗导致的电压差值。为改善无功分配精度,可以通过有互联线方式适当调整空载电压幅值或者采用无互联线虚拟阻抗形式。减小2 个电源到PCC点之间等效阻抗差值。2
2、CCM-VSC 间的功率分配精度分析
CCM-VSC 通过内环控制器实现对功率或者电流指令的跟踪,常用诺顿等效电路表示。内环控制器参数与诺顿电路等效电流源和阻抗关系为:
式中:Icref 为电流指令;Gcc为内环控制器增益;gcc为闭环控制系统等效导纳。
由图2可得:
由上述两个公式可得:

内环控制器的设计常使Gcc和gcc在基波角频率点的值分别约为1 和0。若所给的电流指令一致,则能实现CCM-VSC 间较好的均流特性。
3、VCM-VSC 与CCM-VSC 间的无功分配精度改善控制
令 QmC 为CCM-VSC 计算的无功功率值,假设CCM-VSC 的功率反馈能够准确跟踪功率指令,即QmC≈QC。可得,若kqvkqc=1 成立,则VCM-VSC 和CCM-VSC 之间的无功功率差值为
可见,其值取决于空载电压差异和因为线路阻抗导致的电压差异以及下垂系数。
对于CCM-VSC,忽略线路的阻性部分,并令XLC 为线路感抗,则

若 ,可得
,可得

可见,无功功率差值主要取决于虚拟感抗、下垂系数以及当前的无功功率值。
可以自适应调节VCM-VSC 空载电压值来改善功率分配精度。但该方法将减弱虚拟阻抗对VCM-VSC间无功分配精度的改善。
基于以上分析,提出CCM-VSC 自适应空载电压补偿法,其无功控制方程为:

 可见,该方法无需依据互联线来调整空载电压幅值。只需依据当前计算的无功功率值即可自适应调整空载电压补偿值。
可见,该方法无需依据互联线来调整空载电压幅值。只需依据当前计算的无功功率值即可自适应调整空载电压补偿值。
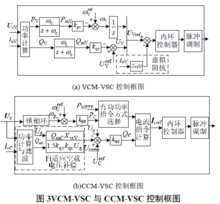
3、控制实现
基于以上分析,本文采用的 VCM-VSC 和CCM-VSC 控制框图如图3 所示。2
实时硬件在环仿真验证1、仿真参数
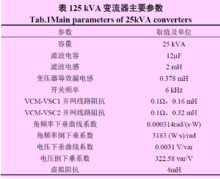 为验证所提控制策略的有效性,基于 dSPACE1005 平台对其性能进行实时硬件在环仿真测试。该平台拓扑如图2,由4 台容量为25 kVA 变流器及1台90 kVA 可调模拟负荷组成。4 台变流器中,2 台变流器控制于CCM:CCM-VSC1 和CCM-VSC2,分别模拟光伏发电和风力发电系统;另外2 台控制于VCM:VCM-VSC1 和VCM-VSC2。4 台变流器参数相同,如表1 所示。
为验证所提控制策略的有效性,基于 dSPACE1005 平台对其性能进行实时硬件在环仿真测试。该平台拓扑如图2,由4 台容量为25 kVA 变流器及1台90 kVA 可调模拟负荷组成。4 台变流器中,2 台变流器控制于CCM:CCM-VSC1 和CCM-VSC2,分别模拟光伏发电和风力发电系统;另外2 台控制于VCM:VCM-VSC1 和VCM-VSC2。4 台变流器参数相同,如表1 所示。
2、VCM-VSC 与CCM-VSC 间均载
实时硬件在环仿真结果和数据分别如图4 和表2所示。初始阶段S0:微电网系统运行于孤岛模式,VCM-VSC1 和VCM-VSC2 采用下垂和虚拟阻抗控制, CCM-VSC1 和CCM-VSC2 均运行最大功率 点、单位功率因数模式下,其有功功率PmC1 和PmC2 均为5 kW,无功功率QmC1 和QmC2 均为0。微电网负荷为阻感负荷,其中电阻R 为9.65Ω,电感L 为46 mH,额定电压工况下对应有功负荷PL 为15 kW,无功负荷QL为10kvar。由于下垂控制特性,微电网电压幅值和角频率稍偏离额定值UN 和ωN,负载有功功率为12.6kW,无功功率为8.4kvar。由图4 和表2 可见,虽然VCM-VSC1 和VCM-VSC2 并网线路阻抗略有差异,但通过虚拟阻抗可实现均载,两者的有功功率PmV1 和PmV2 均在1.298 kW,QmV1 和QmV2分别为在4.233 kvar 和4.153 kvar。2 台VCM-VSC之间有功实现了精确的均分,无功分配误差δV12 为0.019,可见无功分配精度也较高。在该阶段,负荷无功全部由VCM-VSC 提供。2
点、单位功率因数模式下,其有功功率PmC1 和PmC2 均为5 kW,无功功率QmC1 和QmC2 均为0。微电网负荷为阻感负荷,其中电阻R 为9.65Ω,电感L 为46 mH,额定电压工况下对应有功负荷PL 为15 kW,无功负荷QL为10kvar。由于下垂控制特性,微电网电压幅值和角频率稍偏离额定值UN 和ωN,负载有功功率为12.6kW,无功功率为8.4kvar。由图4 和表2 可见,虽然VCM-VSC1 和VCM-VSC2 并网线路阻抗略有差异,但通过虚拟阻抗可实现均载,两者的有功功率PmV1 和PmV2 均在1.298 kW,QmV1 和QmV2分别为在4.233 kvar 和4.153 kvar。2 台VCM-VSC之间有功实现了精确的均分,无功分配误差δV12 为0.019,可见无功分配精度也较高。在该阶段,负荷无功全部由VCM-VSC 提供。2
S1 阶段:在T1 时刻,将CCM-VSC1 控制模式转为ω-P、U-Q 倒下垂模式。在此假设其有功功率与无功功率可自由调配,且认为与VCM-VSC具有相同的有功与无功容量。由于CCM-VSC1 对系统无功功率的支持作用,系统电压偏离额定值的差值减小。由图4 和表2 可见,CCM-VSC1 与2 台VCM-VSC 间实现了较好的有功功率均载,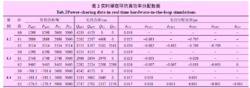 均稳定运行于2.888kW。然而,由于等效线路阻抗差异的影响,CCM-VSC 与VCM-VSC 并没有实现较好的无功均载,CCM-VSC1 与2 台VCM-VSC无功分配误差δV1C1 和δV2C1 分别为0.683 和0.705。
均稳定运行于2.888kW。然而,由于等效线路阻抗差异的影响,CCM-VSC 与VCM-VSC 并没有实现较好的无功均载,CCM-VSC1 与2 台VCM-VSC无功分配误差δV1C1 和δV2C1 分别为0.683 和0.705。
S2 阶段:在T2 时刻,将CCM-VSC2 转变为与CCM-VSC1 同样的工作模式。系统电压偏离额定值的差值进一步减小。同时可见,由于稳态时,系统运行于同一频率,有功功率在4 台变流器之间实现了较好的均载,均稳定运行于3.514kW。
无功功率在2 台CCM-VSC 之间实现了较好的均载,均稳定运行于3.161kvar。但由于等效线路阻抗差异的影响,其并未与VCM-VSC 实现均载,δV1C1 和δV2C1分别为0.682 和0.709。
3、功率分配精度改善
实时硬件在环仿真结果如图5 和表2所示,在本算例中,CCM-VSC 控制中加入自适应的空载电压补偿法控制。与上节相比, 无功功率在VCM-VSC 与CCM-VSC之间实现较好的均载性能。由表2 可见,在S2 阶段,δV1C1 和δV2C1 分别为0.007 和0.033。
 按照 VCM-VSC 有功额定为10 kW,无功额定为10 kvar,最大电压偏差为10%额定电压,最大频率偏差为± 0.5Hz 设置下垂系数。CCM -VSC 按照视在功率为10kVA 计算。
按照 VCM-VSC 有功额定为10 kW,无功额定为10 kvar,最大电压偏差为10%额定电压,最大频率偏差为± 0.5Hz 设置下垂系数。CCM -VSC 按照视在功率为10kVA 计算。
初始条件S0 :CCM-VSC1 和CCM-VSC2 均运行最大功率点、单位功率因数模式下,其有功功率PmC1 和PmC2 分别为5 kW 和9 kW,无功功率QmC1 和QmC2 均为0。
S1 阶段:T1 时刻,启动CCM-VSC1,按照无功储备量,3 台变流器按照QmC1:QmV1:QmV2=8.66:10:10共同分担负荷无功8.8kvar。因此,QmC1、QmV1、QmV2无功功率将分别承担2.6、3.1、3.1kvar。2
结论为了减小储能系统功率调节压力,实现潮流在系统内的合理分配,提出了一种分布式多变流器型微电网无互联线潮流控制。针对VCM-VSC 和CCM-VSC 控制特点,提出了适用于CCM-VSC 的倒下垂控制来实现CCM-VSC 间的功率分配,并通过合理设置CCM-VSC 倒下垂系数与VCM-VSC 下垂系数实现潮流在基于这2 种接口变流器的DR 间的合理分配。同时, 为了改善VCM-VSC 和CCM-VSC 间功率分配精度,提出虚拟阻抗与自适应空载电压结合法。最后,通过实时硬件在环仿真平台验证了所提控制策略的正确性与可行性。结果表明, 功率能够按照需求在VCM-VSC 和CCM-VSC 间合理分配,减小了VCM-VSC 功率调控压力,且分配精度较高。
采用的虚拟阻抗与自适应空载电压结合法暂仅考虑线路阻抗或虚拟阻抗设置为感性工况,其他工况可类比分析。在今后工作中分析多种线路阻抗和虚拟阻抗设置时的功率分配情况,以更好满足实际工程应用的多种需求。3
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国