

虚拟力场法 (Virtual Force Field)的基本思想是构造目标方位的引力场和障碍物周围的斥力场共同作用的虚拟人工力场,搜索势函数的下降方向来寻找无碰撞路径,使船舶沿虚拟排斥力和虚拟引力的合力方向运动。1它是人工势场法原理和栅格法原理结合得到的移动机器人实时避障的虚拟力场法。2
这里以机器人为例。
采用栅格法原理, 我们将移动机器人采集障碍物信息的范围分成若干个视窗单元格, 根据障碍物的位置与
形状 , 每个单元格会对机器人产生不同大小的斥力作用。 定义 为单元格的水平值。 每个单元格的斥力
为单元格的水平值。 每个单元格的斥力
大小与 成正比, 与机器人-障碍物距离成反比。
因此,可得:

其中,W-机器人车体宽度; -斥力常比例系数;
-斥力常比例系数; -单元格与机器人的距离;
-单元格与机器人的距离; -单元格水平值;
-单元格水平值; -机器人当前位置;
-机器人当前位置; 障碍所在单元格位置;
障碍所在单元格位置; -分别表示X轴、Y轴的单位向量;n 为正整数。
-分别表示X轴、Y轴的单位向量;n 为正整数。
根据上式,可以看出 , 当机器人靠近障碍物时 ,由于 的作用,机器人受到的斥力作用会大大加强;反
的作用,机器人受到的斥力作用会大大加强;反
之,当远离障碍物时,斥力会减弱。机器人在势场中受到的斥力 为:
为:
 在任一时刻,目标对机器人产生吸引力
在任一时刻,目标对机器人产生吸引力 :
:
 其中,
其中, -引力常比例系数;
-引力常比例系数; -目标与机器人的距离;
-目标与机器人的距离; -目标所在单元格位置;
-目标所在单元格位置;
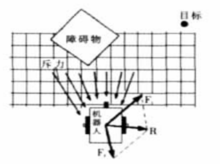
如图1所示,机器人受到的合力为:
合力 R 的方向角 ,而机器人转动的角度是
,而机器人转动的角度是 ,其中,
,其中, —正比例系数常量;θ—
—正比例系数常量;θ—
机器人运动的当前方向; —运动时给定的方向;(-)- 一种求角度运算符; θ(-)δ—从 θ 方向转向方向所需要的最小角度。2
—运动时给定的方向;(-)- 一种求角度运算符; θ(-)δ—从 θ 方向转向方向所需要的最小角度。2
栅格法是由 W.E.Howden 在 1968 年提出的,他在进行路径规划时采用了栅格( Grid) 表示地图。 设环境的最大长度为 L,宽度为 W,栅格的尺度( 长,宽) 均为b,则栅格数为 ,环境 E 由栅格
,环境 E 由栅格 构成
构成 ,i,j为整数。其中
,i,j为整数。其中 表示该格为自由区域,
表示该格为自由区域, 表示该格为障碍区域。
表示该格为障碍区域。
栅格法将机器人规划空间分解成一系列的具有二值信息的网络单元,工作空间分解成单元后则使用启发式算法在单元中搜索安全路径。搜索过程多采用四叉树或八叉树表示工作空间。栅格的一致性和规范性使得栅格空间中邻接关系的简单化。赋予每个栅格一个通行因子后, 路径规划问题就变成在栅格网上寻求两个栅格节点间的最优路径问题。
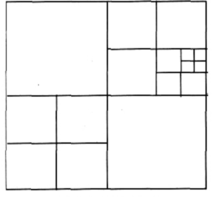
栅格法以基本元素为最小栅格粒度,将地图进行栅格划分,基本元素位于自由区取值为 0,处在障碍物区或包含障碍物区为 1;然后模型递归地把环境分成 4个大小相等的子区域,直到每个区域中所包含的基本单元全为 0或全为 1。 这样在计算机中就较容易建立一幅可用于路径规划的地图,如图 2所示。3
人工势场法是由Khatib提出的一种虚拟力法。原理是:将机器人在环境中的运动视为一种机器人在虚拟的人工受力场的运动。障碍物对机器人产生斥力,目标点对机器人产生引力,引力和斥力的合力作为机器人的加速力,来控制机器人的运动方向和计算机器人的位置。
引力场(attraction)随机器人与目标点的距离增加而单调递增,且方向指向目标点;
斥力场(repulsion):在机器人处在障碍物位置时有一极大值,并随机器人与障碍物距离的增大而单调减小,方向指向远离障碍物方向。
应用机器人避障近年来 ,机器人技术已经得到广泛应用,遍及工业、 国防、 农业、 宇宙空间、 海洋开发等领域。 移动机
器人的路径规划是其中的一个重要的研究方向。目前常用的路径规划方法主要有栅格法 、人工势场法 、D*算法、遗传算法等,人工势场法以其快捷的环境描述和算法形式,在机器人实时避障中得到了广泛的应用。文献4采用将人工势场法原理和栅格法原理结合得到的移动机器人实时避障的虚拟力场法(VFF)。2
大型船舶具有线型尺度大、方型系数大、吃水大和惯性大等特点,在引领此类船舶时,一定要综合考虑各方面的因素,采取合适的避让措施,控制其在主航道上,以确保船舶的航行安全。
大型船舶,特别是大型集装箱船,船头和左右两舷的盲区都较大,在了望时不要总站在驾驶台中间,要左右两舷多走动,以便及早发现来船,及早判断出本船与他船所形成的局面,是对遇、交叉还是追越,以便及早做出符合规则的避让措施。要备车航行,使用随时都可以慢车的主机转速。要保证船舶在主航道上,所以应少用舵让,多用车让。大型船舶惯性大,当周围环境复杂,要慢车避让时,要尽早进行。
针对大型船舶随机变化的情况,在避障控制算法的选用中,应该考虑应用虚拟力场法来使船舶完成在路径不断变化条件下的移动,使其尽快地达到工作位置。1
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国