

基本概念
随着无人机任务向多样化方向发展,遥测参数不断增多,遥测帧结构编排更加复杂,遥测系统需要处理的数据类型和数据量越来越多。电子技术的飞速发展使微处理器的工作频率不断提高,遥测数据采样率也随之提高,导致遥测系统需要实时处理的数据量急剧增加,这给遥测数据处理技术带来了极大的挑战。就当前计算机技术发展状况和趋势来看,要提高遥测系统的实时处理能力,一方面可以通过提高处理器本身的速度来提高计算机的性能,从而提高遥测系统的数据处理效率;另一方面可以采用并行处理的方式,包括多台计算机同时对遥测数据进行处理以及每台计算机采用多线程编程的方法对遥测数据进行处理。目前,对于中小型任务采用单站处理的方式,对于大型任务采用小型机或高档微机作为服务器,多台微机为工作站的方式,进行分布式并行处理的方式,能够有效提升遥测系统的效率,缩短遥测数据处理周期。
遥测数据处理按数据处理时序可划分为遥测数据实时处理、遥测数据准实时处理以及遥测数据事后处理。实时处理是指在进行地面测试或飞行试验时,从地面测控站实时测得的遥测数据中,挑选关键参数送往测量终端或指控中心进行处理及显示,使指挥及技术人员能够实时监视无人机的飞行状态和任务执行状态,为指挥决策提供可靠的依据。实时处理是遥测参数测量与处理同时进行,一般由地面测控站采用尽量简单的处理方法来处理,以提高遥测数据的处理速度。
准实时处理是指在试验完成后的较短时间内,对部分主要参数进行处理,供技术人员对试验情况或故障问题做出初步判断和分析。准实时处理是在试验任务结束后,马上对遥测数据进行处理,一般在任务完成后1-2个小时内提供原始遥测数据的处理结果。遥测数据准实时处理结果没有对遥测数据进行全方位的检测,准实时处理结果仅作为任务执行情况和故障分析的参考依据。
事后处理一般在试验结束后,由测控中心对各遥测站传输来的原始遥测数据进行整理,对含有冗余数据和野值的遥测数据进行检查,选择冗余度低、野值数量少的遥测数据进行剪切和拼接,从而得到试验过程高质量的数据;并对全部参数进行处理,包括对各种测量干扰及误差的剔除及修正,处理后得到的遥测数据事后处理报告将作为无人机研制部门分析研究、靶场鉴定以及无人机飞行试验质量评定的有效依据。
遥测数据处理软件一般具有实时处理和事后处理两种工作模式,在实时处理工作模式下,遥测数据处理软件接收试验网的数据报,把数据报以二进制数据文件保存到计算机硬盘的同时,将遥测系统接收到的数据报还原成物理量,直接以数字、图形或者虚拟仪表的方式显示在主显示界面上;在事后处理工作模式下,遥测数据处理软件将直接读取计算机中存储的二进制数据文件,按照通信协议中规定的数据转换方法,将二进制文件转换为具有实际意义的物理量,并且以较为直观的直角坐标系曲线和数据表格的形式显示出来。无论遥测数据处理系统处于哪种工作模式,都需要使用一定的算法对遥测数据进行野值点的剔除和高斯白噪声的消除。
遥测数据处理分类遥测数据处理按照处理时序可分为实时处理、准实时处理和事后处理。
实时处理实时处理是指在进行地面测试或飞行试验时,从测量站实时测得的遥测数据中,挑选关键参数送往测量终端或指控中心进行处理及显示,供指挥及技术人员实时监视,作为指挥决策的依据。实时处理的特点是数据测量与处理同时进行,一般由遥测站实施处理,要求处理速度快,处理方法尽量简单,所处理的参数数量受到限制,多为实时外弹道测量参数、时间指令参数、安全控制参数及其他重点关心参数。
准实时处理准实时处理或称快速处理,是指在试验完成后的较短时间内,对部分主要参数进行处理,供技术人员对试验情况或故障问题做出初步判断和分析。准实时处理的特点是测量结束后立即进行处理,一般在试验结束后1-2个小时内提供数据处理结果,多用于技术阵地测试、发射阵地测试和现场故障分析。由于没有对所记录的数据进行全面、综合的检查,处理结果仅供掌握试验情况和故障分析使用,不作为最终结果提供。处理的参数一般为制导和控制系统参数、时间指令参数以及与故障分析相关的参数。
事后处理事后处理是指试验后将各测量站所测的原始数据汇总于数据处理中心,对有冗余测量的数据进行质量检查,择优进行剪辑和拼接从而得出试验全过程的完整数据;并对全部参数进行处理,包括对各种测量干扰及误差的剔除及修正,处理后的结果将作为研制部门分析研究与靶场鉴定的最终依据。事后处理的特点是处理工作严格按照有关文件规定进行,这些文件包括:飞行试验大纲、遥测大纲、遥测参数数据处理要求和方法及飞行试验遥测实施方案等。遥测数据事后处理报告是遥测数据处理的最终结果,是评定飞行试验质量的有效依据,处理过程一般在数据处理中心进行。
随着计算机技术、通信与网络技术的发展,遥测实时、准实时和事后处理的界限正在逐渐淡化。通过远程数据传输,数据处理中心也可以作实时和准实时处理;遥测站在测量结束后也可以进行部分事后处理工作。1
遥测数据处理流程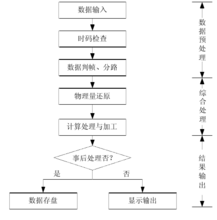
数据输入环节完成数据的输入,可分为实时数据输入和事后文件输入。实时数据输入就是将测量站接收到的遥测数据实时传送给处理系统,对其中重要的数据进行实时处理显示;事后文件输入是以测量站记录的数据文件作为数据源,应用于准实时处理和事后处理。
时码检查环节完成以下工作:一是以零点时刻为基准,修正各测量站记录时间的系统误差,也称为时统对准;二是纠正记录数据中由于随机原因产生的时间跳变及乱散点。
数据判帧与分路环节完成帧同步码判别,并按照帧中参数编排格式,将各路遥测参数分离,形成各参数初始分路数据文件,以便进行后续处理。
物理量还原环节完成参数的物理量还原,按参数处理要求将分路后的原码数据还原成对应的物理量。
计算与加工环节完成包括消除趋势项、抑制周期性干扰信号,剔除跳点等工作,在信号分析以前,采用数学计算方法来增强信号、减小干扰,从混有各种因素干扰的信号中提取所需信息。
显示输出环节完成参数处理结果的显示、打印及存盘工作。
系统总体设计遥测数据综合处理系统具有用户登录、数据接收、数据处理、数据综合显示、数据回放、数据存储等功能,本文将遥测数据综合处理系统划分为用户登录模块、网络通信模块、数据处理模块、综合显示模块、数据回放模块、数据存储模块和系统安全退出模块,系统功能框图如图所示。
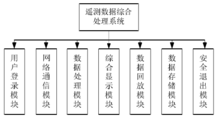
各模块功能如下:
用户登录模块:在用户登录界面输入用户名和密码,实现验证用户信息,如果用户名和密码均正确,则成功登录无人机遥测数据综合处理系统,否则无法登录该系统。
网络通信模块:实现局域网中广播数据报的接收,并能够将本地遥测数据通过广播的形式发送到局域网中。
数据处理模块:对网络通信模块传输过来的原始遥测数据进行物理量还原、野值剔除、噪声消除等操作,并将处理过的数据送至综合显示模块。
综合显示模块:将数据处理模块传输来的遥测数据以数字、图形、虚拟仪表等形式实时显示在主显示界面,使用户能够实现对无人机飞行状态的实时监视。
数据回放模块:在数据回放模式下,选择本地遥测信息数据文件,实现遥测信息数据文件的回放,使用户可以在主显示界面查看遥测数据文件播放过程。
数据存储模块:实现原始遥测数据以二进制文件的形式保存到本地计算机,实现以Access数据库文件的形式保存遥测参数。
安全退出模块:实现退出无人机遥测数据综合处理系统前释放系统资源。2
特点1.计算机速度大幅度提高,常用微机处理速度己达每秒数十亿次。目前,对于中小型任务采用单站处理的方式,对于大型任务采用以小型机或高档微机做为服务器,多台微机为工作站的方式,进行分布式并行处理的方式,处理时间由2-3个月缩短到数天。
2.数据的总采样率极大提高,随着弹上全编码的实现及频段的更新,数据传输的抗干扰能力得到了加强;记录介质由胶片、磁带,发展到热敏纸和磁盘;遥测设备在不断向小型化、数字化、通用化方向发展。
3.程序编制由手编指令、汇编语言直到使用多种高级语言,编程手段得到加强;数据处理方式由手工处理、模拟分析加计算机处理到全数字化的计算机处理。
4.测量参数更多,遥测帧结构编排更加复杂,数据库技术得到应用,并在处理结果检查、故障分析、试验数据的规范化、自动化管理等方面发挥作用。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国