

基本概念
步态是指机器人的每条腿按一定的顺序和轨迹的运动过程,是确保步行机构稳定运行的重要因素。平动步态是指机器人步行时始终保持机体平移。定点转弯步态是指机器人机体绕某轴转动的步态。步态设计包括确定支撑相、摆动相运动的开始和结束。为了在步态生成过程中保持机体的稳定性,要求机器人行走过程中,必须保证至少有三条足处于支撑相状态。同时,为了确保样机在行走过程中具有较好的稳定性,规定相邻步行足不可以同时处于摆动相状态,即机器人的相邻足不可能同时开始摆动。1
步态规划步态规划是使机器人按照规划的步态运动的一种控制方法。研究者们提出了许多步态规划方法,如仿生学方法、智能学习算法、模型简化等。下面依次分别介绍这几种规划方法。
基于仿生学的步态规划方法
仿人机器人是模仿人的形态和行为制造的机器人,它具有类人的结构设计,因此,可将人类的仿生步态用于仿人机器人的步态规划。基于仿生学的步态规划方法就是使用仪器记录人的步行运动数据,然后将记录的数据进行修正,使其更适合仿人机器人的驱动方式、质量分布、机械结构等,最后将修正后的数据作为机器人的输入控制参数,因此,该规划方法比较简单。本田公司研制的仿人机器人ASIMO和北京理工大学研制的仿人机器人BHR-2,它们的步态设计就是采用了仿生学步态规划方法,并取得了良好的效果。然而,不同仿人机器人的物理结构往往差异很大,加之目前还很难采集到准确而完备的HMCD,此规划方法仍具有一定的局限性。
基于算法的步态规划方法
环境适应性不足和学习能力差是现有仿人机器人控制系统的主要缺陷,而像神经网络、模糊控制、遗传算法等智能算法具有较强的学习、容错和自适应能力,因此常常被用于规划仿人机器人的步态。
基于神经网路的步态规划方法由输入节点变量、中间神经元和输出节点变量组成,输入节点变量是在仿人机器人的步行周期内,采集各关节的坐标和微分,输出节点变量为各关节的角度或力矩等,通过设计相应的中间神经元来规划机器人的步态。该规划方法需要大量的样本和计算来确定每个神经元的权重,同时,还需解决样本空间构造和收敛性问题。
基于模糊控制的步态规划方法中,模糊控制器的输入变量由仿人机器人运动过程中实时的步行状态参数和预先设定的步态初始参数组成,输出变量是每一关节的力矩或角度,按照一定的模糊控制规则来规划机器人的步态。由于仿人机器人的姿态和行走环境是多变的,故需要较多的控制规则,因此,该规划方法仅适于一些仿人机器人的姿态和行走环境都相对简单的情况。
基于遗传算法的步态规划方法是先将重要关节的位置、速度和加速度等在各关键时间点上设定好,并用多项式插值的方式得到参数化的步态,然后采用遗传换算法找到满足步态稳定性最多条件下的最优参数,以得到稳定性较强的期望步态。
基于模型的步态规划方法
基于模型的步态规划方法是将复杂的机器人系统通过解祸和、降阶等方法简化为比较简单的模型来分析研究的,常用的模型有连杆模型、质量弹簧模型、D-H模型·倒立摆模型等。
连杆模型是将机器人腿部各关节之间的部分和上半身均看成质量均匀的刚性连杆,对机器人进行步态规划时,首先规划其关键关节运动轨迹,并由几何导出剩下各关节的轨迹,接着优化步态参数,使其ZMP在稳定区域内最后逆运算求解出各关节的角度轨迹。
弹簧质量模型((pring一mass model),把机器人的步行运动描述成一个由质点和无质量、无阻尼的直线弹簧所构成的等效腿模型,通过建立模型系统的运动学方程,并结合机器人步行运动的周期性、对称性、固有结构等建立的约束方程,求解出该模型下,机器人的行走步态参数。
D-H (Denavit-Hartenberg)模型,将仿人机器人的每个关节都设定一个参考坐标系,然后,通过一定的变换关系,实现关节(坐标)间的变换。例如,要得到第n个关节的变换矩阵((4阶方阵),就需要从基坐标开始推到第1个坐标、第2个坐标直至第n个坐标,最后将之前的n-1次变换结合起来就得到了第n个关节的变化矩阵。
倒立摆模型是假设仿人机器人的所有质量都集中在质心上,两条腿看做两个无质量、可伸缩的摆杆,建立仿人机器人的三维线性倒立摆模型。设出相应的步态参数,通过建立并求解运动学方程的方法,得到期望的质心和摆动腿的运动轨迹。2
策略研究概述随着自然界的蓬勃发展,自然界的动物依据物竞天择的自然规律不断进化,生物的运动系统变得越来越灵活稳定,科学家们通过不断的观察自然界生物运动形态从中得到灵感来控制机器人运动。近些年来的足式机器人运动学研究工作中,仿生学给科学家们带来了很多设计思想和行走实例,对足式机器人的运动机制研究起了很大的推动作用。在仿生实验中人们通过不断地观察动物运动发现很多动物的行走具有一定的规律性,对环境的适应能力也很优越。
总结近年来在机器人步态控制上的优秀成果,一部分人单纯的采用传统运动学的解算,通过建立机器人坐标系来计算出各关节的转动角度使各关节同步运动,但这种方式很难实现各种步态的灵活变换,每条腿的时序同步也不能得到很好的保障;目前大部分科学家选用仿生学的中枢模式发生器(CPG)来设计足式机器人的运动系统,即中枢神经接收到上层的控制指令自动生成相应的节律运动,类似人的脊髓功能。这种控制结构一般分为两层神经中枢结构,腿部时序控制层和单腿关节时序层,这种方式解决了各种步态的灵活变换问题,但是又引入了一个新的问题,就是两层中枢模式发生器的柔性耦合问题。3
控制方法基于ZMP方法
沿双足机器人足底分布具有相同方向的负载等效于一个合力,该合力在地面上的作用点称为ZMP点。通过预先设定或实时调整的方式,控制ZMP点始终落在稳定区域内,从而可保证机器人的身体平衡。如Suzumura等和Taskiran等都是依据ZMP稳定性准则实现了机器人步态的稳定控制。
基于庞加莱回归映射方法
双足机器人步行运动可看作为单足支撑期和双足支撑期交替出现的一种呈周期性的行为,步态系统中各状态变量会表现为极限环(周期轨道)。因此,可将极限环的稳定性问题转变成过庞加莱截面的平衡点稳定性问题。如Goswami等和Grizzle等均应用庞加莱回归映射方法分析了双足机器人的稳定性问题。4
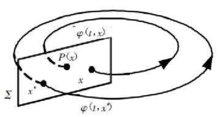
稳定性判据庞加莱映射步态稳定判据
如图所示,我们知道,在不动点的某一邻域内,线性化矩阵DP(x)的特征值的模决定了庞加莱映射不动点的稳定性,当其所有模值都小于1时,庞加莱映射不动点即是稳定的。
此时,周期轨线就是一个稳定的极限环,也是渐进稳定的。因此,可以通过判定庞加莱映射固定点的稳定性来判定周期轨线的稳定性,从而判定系统稳定性。从以上的判断方法可以看到,虽然庞加莱映射步态稳定性判据的在一定意义上简化了双足步行系统的稳定性判断,但却只能用于分析呈周期性运动的步行系统的稳定性,由于判断过程中用到了近似,也使其仅局限于小扰动的情况下。
ZMP姿态稳定判据我们知道,人在步行过程中,脚掌受到地面产生的反作用力,同时还会受一个惯性力,零力矩点(ZMP)就是这两种力的净力矩之和又称为零的点。
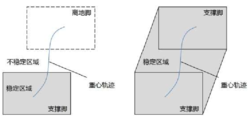
支撑多边形是指机器人足底面和地面接触点构成的最小多边形,如图所示,图中实框表示支撑脚与地面接触的面积,虚框表示离地脚在地面上投影的面积,蓝色曲线表示重心的移动轨迹在地面上的投影,灰色部分表示稳定区域,从而得到基于ZMP的姿态稳定性判据,即要实现机器人步态的稳定,则步行运动中ZMP一直在脚掌的支撑凸多边形中。
80年代,口本早稻田加藤一郎实验室最早将ZMP的概念实际应用到动态平衡的仿人机器人中,并制作了一系列的WL机器人。发展到现在,ZMP成为仿人机器人稳定性分析中应用最广泛的稳定性判据,像口本有名的仿人机器人Honda和Asimo就利用了ZMP来实现动态步行平衡的。尽管如此,用ZMP判据进行步行稳定性分析仍有一定局限性,当机器人步行运动中存在以下两种情况时,ZMP处于支撑脚的边缘,此时,ZMP判据将不再适用:一种是支撑脚己经离开地面,而摆动脚己经触地但未完全触地,呈脚跟欠驱动相;另一种是支撑脚正准备离地,而摆动腿尚未触地,呈脚尖欠驱动相。除此之外,因为仿人机器人具有强祸合的特性,建立仿人机器人的数学模型和进一步去求解控制法则都较复杂,所需要的数学运算更是一件困难的工作,故不容易得到理想的ZMP轨迹。
一般情况下,有如下两种方法用于步态规划的设计,且均是基于ZMP稳定性判据的:
1、在保证ZMP稳定条件的前提下,规划出理想的机器人各关节的运动轨迹,接着由轨迹推出其运动方程并求解;
2、先规划出机器人各关节的运动轨迹,然后推出满足ZMP稳定的运动轨迹,最后,取两者最相近的轨迹。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国