

简介
为了探索多自由度超声波电机在微型机器人等控制领域的应用,电机的位姿检测与控制方法.以基于三定子的二自由度球形超声波电机为研究对象,以定子角速度的极小范数为优化目标,结合角速度矢量合成原理和电机的相位差调速方式,建立电机的前馈模型;基于机械鼠标原理的位姿检测机构,反馈球转子的姿态量,并结合分段斜率比较的控制策略实现电机位姿控制.电机闭环轨迹控制的误差率为1. 3%,位姿检测与控制的效果较好,为二自由度球形超声波电机的推进打下扎实的基础1
超声波电机是一种新型的微特电机,已利用压电材料的逆压电效应,激发定子弹性体在超声频段内的微幅振动,通过摩擦作用将振动转换为转子的旋转运动.该电机在机器人、光学仪器和航空航天等领域中具有广阔的应用前景。
多自由度球形超声波电机是近年来超声波电机领域的研究热点.而电机的速度/位置检测一直是其难点,原因在于该类电机的转子是球体,单自由度电机的检测方法不能简单地复制,需新的检测机构和方法.
目前常见的多自由度球形超声波电机的位姿检测方法可分为接触型和非接触型2类.接触型检测的典型结构为滑轨支架测量系统少,该系统原理简单,检测精度较高.最早由Toyama等,采用1个弧形十字球绞机构和2个光电编码器检测二自由度电机转子的位置.Lee等的改进方案可检测三自由度电机.傅平等叫采用调心轴承和连杆机构来检测球转子运动姿态.上述机构都会增加电机的损耗和限制球转子的转动范围.
非接触型检测的典型结构为视觉识别测量系统等在球转子表而喷涂网格,并利用CCD镜头来识别网格位置,但该结构复杂,实用性较差.Purwant。等.了使用霍尔元件检测电机姿态的方案,但精度较低,算法复杂.Mashimo等利用激光检测球转子的位置,由于光纤尖端的表而差异和界而反射导致定位精度受限.
因此,研究适合多自由度球形超声波电机的位姿检测机构,实现高精度的电机位姿控制是当前球电机应用中函需解决的关键问题.首先介绍电机的结构和工作原理;其次电机的位姿检测机构、驱动方式、调速方式和控制策略;最后,对电机位姿控制方案进行测试,验证方案的有效性和精确度.
电机结构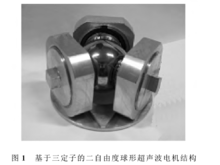 研究室自主研制的基于三定子的二自由度球形超声波电机的结构如图1所示,电机由3个定子、1个球转子和预紧力加载机构组成.3个行波型环状定子绕空间轴回转120。对称分布,由于3个定子的中心轴线通过球心且处于同一球截而内,电机从三自由度退化为二自由度.定子均采用大斜齿而内缘接触结构,能提高定、转子的能量传递效率.球转子采用X40 mm氮化硅材料的高精度陶瓷球,该陶瓷球相比普通钢球,具有质量轻、耐磨性好和抗氧化性强等优点.预紧力加载机构由柔性板簧、板簧压套、板簧座和侧盖等元件组成:环状定子以过盈配合方式固定安装在柔性板簧的中心孔内,柔性板簧的3个引脚被固定于板簧压套上,圆环形板簧压套可在板簧座内轴向移动.板簧座固定在底座上,拧动侧盖可调节板簧压套的位移,进而调节柔性板簧的压紧量,实现定、转子之间预紧力的调节2.
研究室自主研制的基于三定子的二自由度球形超声波电机的结构如图1所示,电机由3个定子、1个球转子和预紧力加载机构组成.3个行波型环状定子绕空间轴回转120。对称分布,由于3个定子的中心轴线通过球心且处于同一球截而内,电机从三自由度退化为二自由度.定子均采用大斜齿而内缘接触结构,能提高定、转子的能量传递效率.球转子采用X40 mm氮化硅材料的高精度陶瓷球,该陶瓷球相比普通钢球,具有质量轻、耐磨性好和抗氧化性强等优点.预紧力加载机构由柔性板簧、板簧压套、板簧座和侧盖等元件组成:环状定子以过盈配合方式固定安装在柔性板簧的中心孔内,柔性板簧的3个引脚被固定于板簧压套上,圆环形板簧压套可在板簧座内轴向移动.板簧座固定在底座上,拧动侧盖可调节板簧压套的位移,进而调节柔性板簧的压紧量,实现定、转子之间预紧力的调节2.
工作机理二自由度球形超声波电机通过行波型环状定子的齿内缘摩擦驱动球转子.当给某一个定子施加两路在空间和时间上都相差90。的正弦波激励,同时给剩余2个定子施加驻波信号时,可驱动球转子绕着某一定子中心轴线回转,调节激励电压的相位差,可以控制球转子的速度和方向,这是最简单的单自由度驱动原理。
运动姿态控制运动姿态测量机构球形转子的二自由度运动姿态可由二对行波定子驭动决定,通过控制各对的运动速度和转向,可使球形转子转向各个方向,为检测球转子的运动姿态,国外采用球绞结构和两个光电编码器但由于球绞实现困难,我们采用了调心轴承和连杆的测量结构。
在球转子上安装输出轴(其轴线通过球心),输出轴上装有能两自由度回转的调心轴承,在调心轴承的轴承座圆环上与各自光电编码器相连的连杆连接,两连杆与调心轴承在同一平而内 (这一平而与四个行波定子组成平而平行),当输出轴在中心位置时(即输出轴轴线垂直于四个行波定子组成的平而时),两连杆是互相垂直的,即各连杆中心线与调心轴承中心相交,球转子转动时,调心轴承也随之向外移动并且两自由度转动,其轴承中心仍在两连杆组成的平而内。另外,各连杆与各光电编码器轴线垂直相交,连杆可在与光电编码器轴的相交点滑动,并带动光电编码轴回转;同时,为避免出现冗余自由度,连杆1与调心轴承座圆环固连,连杆2与调心轴承座圆环铰接,这样做,输出轴偏离中心位置时,即球转子运动姿态变化时,连杆1中心线继续保持通过调心轴承中心,而连杆2中心线则不能保证通过调心轴承中心。
运动姿态控制策略对于球转子运动姿态可以用上述尸点在xoy平而的运动位置描述,即控制目标由球转子的运动姿态角转化为尸点的运动位置,由于姿态角与尸点关系较简单,这里就不再赘述了。
超声波电机的位置控制一般采用相位差控制、频率控制和调压控制等策略。对于二自由度超声波电机来说,由于要求四个行波定子在工作时的谐振频率基木一致,而定子由于加工、材料和工艺等原因,很难保证一致,修正行波定子外缘倾角大小的方法来使四个定子的谐振频率接近一致,且行波定子的谐振频率的带宽一般较小,所以不宜采用变频法。若采用调压控制,虽然可以实现一定的控制效果,提高电机的转速,但是硬件电路的实现比较复杂,而且由于调压时电机定子电压的峰一峰值在不断改变,因此电机会出现速度波动,这不利于电机的平稳运行。
对于球形二自由度超声波电机来说,采用相位差控制是比较理想的控制方案。相位差控制只需要用软件改变定子驭动信号的相位差,方法简单且可靠实用,不需要增加额外的硬件电路。只要控制得当,对电机输出转速的影响较小,可以实现电机的平稳运行。更重要的是因为电机是由两对定子驭动采用相位差控制有无可比拟的优越性,这是由于电机的静摩擦系数大于行波驭动时的摩擦系数。假设一对定子由行波驭动,另一对定子不驭动,这时不被驭动的这对定子与转子间为静摩擦,也就是说球转子无法在行波驭动的那对定子作用卜运动,这是因为静摩擦产生的阻力矩大于行波驭动定子的驭动力矩。若不被驭动的那对定子改为驻波驭动,虽然行波驭动的那对定子产生的驭动力矩不变,但是此时驻波驭动的定子与转子间为动摩擦,而动摩擦产生的阻力矩远小于静摩擦产生的阻力矩,因此,行波驭动定子的驭动力矩就大于动摩擦的阻力矩,这样,球转子就可以顺利地运转了。
总结球形二自由度超声波电机的运动依赖于两对定子联合驭动,只能采用相位差控制协调动作,而且具有两自由度运动姿态精度高、运动快和平稳等特点。
实验结果表明,木系统所使用的驭动电路可以使球形二自由度超声波电机实现二自由度运动,的姿态测量连杆机构以及相应的控制算法可以实现电机的运动姿态控制,为球形二自由度超声波电机的应用提供了坚实的基础。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国