

简介
国内外 提出利用软件来完成永磁同步电机转子位置检测,但很少涉及转子初始位置检测。其实,电机转子初始位置的检测是位置传感器调速系统中一个必不可少的环节。转子初始位置检测失误,会严重影响转子位置的计算,以致无法正确完成电机控制的其它一系列算法,将造成电机运转的紊乱,使之无法进入正常运行。同时,永磁同步电机的初始位置检测不同于正常运转状态下的位置检测,后者可通过位置传感器检测转子的运转来间接得出。
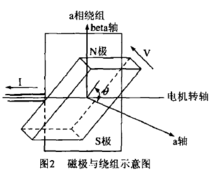
复合式光电编码器检测转子初始位置的方法对于正弦波永磁电机,转子磁极经精心加工,其切割定子绕组时产生正弦波感应电势1。
 实际应用较多的光电编码器是复合式光电编码器,复合式光电编码器是一种带有简单磁极定位功能的增量式光电编码器,它输出两组信息,U,V,W,A,B,Z及反相的U-V-W-A-B-Z一信号。一组用于检测磁极位置,带有绝对信息功能,三路彼此相差120。的、占空比为0. 5的三路脉冲信号U,V,W;另一组完全同增量式光电编码器,输出三路方波脉冲A,B和Z0A,B两路脉冲相位差900,这可以判断转向,Z脉冲每转一个,用于基准点定位。U,V,W信号用于永磁同步伺服系统转子磁极的初始定位。
实际应用较多的光电编码器是复合式光电编码器,复合式光电编码器是一种带有简单磁极定位功能的增量式光电编码器,它输出两组信息,U,V,W,A,B,Z及反相的U-V-W-A-B-Z一信号。一组用于检测磁极位置,带有绝对信息功能,三路彼此相差120。的、占空比为0. 5的三路脉冲信号U,V,W;另一组完全同增量式光电编码器,输出三路方波脉冲A,B和Z0A,B两路脉冲相位差900,这可以判断转向,Z脉冲每转一个,用于基准点定位。U,V,W信号用于永磁同步伺服系统转子磁极的初始定位。
值得注意的是:复合式光电编码器的极对数要与电机的极对数一致,转子旋转一周编码器U,V,W相中任一相就发出与极对数相同的脉冲个数。使用一台四通道的示波器可得到转子初始位置与U,V,W相电平组合的对应关系。通道1探针连接U相,地连接V相;通道2,3,4探针分别连接编码器的U,V,W相,地连接编码器的地;编码器加上电源,面对电机前端反时钟方向转动电机。第一行正弦波为电机作为发电机时U相和V相绕组间的感应电势,第2,3,4行是编码器U,V,W相发出的方波电平信号,横轴表示转子转过的电角度。根据U,V,W相的电平高低的组合可知转子的区间范围。根据U,V,W的3位信号,可以将转子位置确定在60。电角度的范围里。,当U,V,W读数在100时,则取其角度为0-60。区间的中间位置(即300),这样转子的位置误差不会超过300电角度。
有传感器位置检测技术转子位置检测技术分有传感器检测技术和无传感器检测技术。有传感器位置检测技术主要指通过在系统中加装位置检测传感器来检测转子位置的方法。有传感器位置检测技术根据所添加位置传感器的不同又可分为旋转变压器检测技术、光电编码盘检测技术、解算器检测技术等,其中旋转变压器检测技术、光电编码盘检测技术最为常用1。
旋转变压器检测技术旋转变压器是电机常用检测元件之一,旋转变压器分正余弦旋转变压器、线性旋转变压器、比例式旋转变压器等。
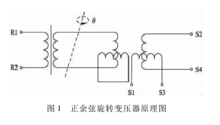 正余弦二对极无刷式旋转变压器原理如图1所示,R1R2为励磁绕组,S1 S3, S2 S4为定子输出绕组。工作时若在R1、2两端输入高频交流电压信号,产生脉振磁场,当转子随电机旋转时,脉振磁场随之旋转,从而在定子绕组感应出与转子位置有关的脉振电动势。因为S1 S3 , S2 S4两套绕组互相垂直,输出信号相位差90°,形成随转子位置变化的正余弦信号,其输入输出关系为 旋转变压器在性能上可靠性高,有较强的抵抗外界恶劣环境的能力,但需要设计复杂的信号处理电路。这些信号处理电路的可靠性和精度对转子位置检测有很大影响,并且造价昂贵导致成本大幅增加,限制了旋转变压器的应用范围1。
正余弦二对极无刷式旋转变压器原理如图1所示,R1R2为励磁绕组,S1 S3, S2 S4为定子输出绕组。工作时若在R1、2两端输入高频交流电压信号,产生脉振磁场,当转子随电机旋转时,脉振磁场随之旋转,从而在定子绕组感应出与转子位置有关的脉振电动势。因为S1 S3 , S2 S4两套绕组互相垂直,输出信号相位差90°,形成随转子位置变化的正余弦信号,其输入输出关系为 旋转变压器在性能上可靠性高,有较强的抵抗外界恶劣环境的能力,但需要设计复杂的信号处理电路。这些信号处理电路的可靠性和精度对转子位置检测有很大影响,并且造价昂贵导致成本大幅增加,限制了旋转变压器的应用范围1。
光电编码器检测技术光电编码器是应用比较广泛的位置检测元件。光电编码器分为绝对式光电编码器、增量式光电编码器和混合型光电编码器。其中在工程上应用较广的是绝对式光电编码器和增量式光电编码器2。
无传感器位置检测技术通过安装检测元件来检测转子位置的方法需要一定的空间位置,增加了系统成本和复杂性,降低了可靠性和抗干扰能力。无位置传感器技术主要包括反电动势检测技术、高频信号注入调制技术等1。
高频信号注入检测技术高频信号注入法主要是利用电机的凸极效应来检测转子位置。利用注入旋转高频信号引起电机d,q轴磁路饱和程度的差异,实现转子位置的检测,同时根据定子铁心的非线性磁化特性判断永磁体的N/S极极性(此方法更适用于凸极率较高的PMSM);也可以利用脉振高频信号注入结合查表法获取转子位置,并利用磁场饱和引起的电感量的变化来辨识磁极极性(此方法更适用于表面安装的PMSM)。当注入高频电压信号频率远高于额定基波频率时,电机的感抗取决于自感。忽略定子电阻和永磁极磁链的影响,注入高频激励下的电机模型定子电压和磁链方程为

智能检测技术PMSM数学模型是非线性的,且存在大量不确定因素影响对电机位置的检测,如参数摄动、逆变器输出含有高频谐波及其他干扰信号等。模糊控制技术是解决系统不确定因素的有效方法,而人工神经网络的自学习功能是解决系统非线性辨识和控制的有效手段。将径向基函数(RBF)神经网络应用于PMSM无位置传感器控制系统中,该方法中RBF神经网络在高、低速情况下都能很好地估计出转子位置,并具有良好的动态响应和调节能力。黄庆等圈提出一种基于模糊自抗扰理论的PMSM无位置传感器控制系统,设计了速度环的二阶模糊自抗扰控制器,电流环的一阶模糊自抗扰控制器,使系统具有良好的动、静态性能和转速辨识能力,调速范围宽,对负载扰动具有较强的鲁棒性3。
总结在PMSM控制系统中,转子位置检测直接影响到控制性能。常用的方法是采用位置传感器来检测转子位置,但是位置传感器增加了系统的成本,降低了系统的可靠性,并且其应用也受到环境条件的限制,从而限制了电机的应用范围。反电动势无传感器检测技术计算简单、控制有效,但在低速时对定子电压和电流值的变化十分敏感,无法估计出转子的初始位置。高频信号注入检测技术的转子位置与转速无关,克服了反电动势法的缺陷。智能检测技术具有良好的动、静态性能和转速辨识能力,调速范围宽,对负载扰动具有较强的鲁棒性2。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国