

发展应用
步进电机细分驱动技术首先是由美国学者T.RrFedriksen在美国增量运动控制系统及器件年会上提出。最初,对步进电机相电流的控制是由硬件来实现的,每一相绕组的相电流用n个晶体管构成n个并联回路来控制,靠晶体管导通数的组合来控制相电流。随着计算机技术的发展,特别是单片机的出现,开创了步进电机细分驱动技术的新局面。用单片机控制的步进电机细分驱动电路不仅减小了控制系统的体积、简化了电路,同时进一步提高了细分精度和控制系统的智能化,从而使细分驱动技术得到了推广。
国内步进电机细分驱动技术在九十年代中期得到了较大发展,主要应用在工业、航天、机器人、精密测量等领域,如数控机床、跟踪卫星用光电经纬仪中采用了步进电机细分驱动技术,大大提高了控制与测量精度。
细分驱动原理步进电机的驱动是靠给步进电机的各相励磁绕组轮流通以电流,实现步进电机内部磁场合成方向的变化来使步进电机转动的。图1是三相反应式步进电机的磁场矢量图。图中的矢量T-A,T-B,T-C为步进电机A,B,C三相励磁绕组分别通电时产生的磁场矢量,T-AB,T-BC,T-CA为步进电机中AB,BC,CA两相同时通电产生的合成磁场矢量。从图1a中可以看出,当给步进电机的A,B,C三相轮流通电时,步进电机的内部磁场从T-A变化到T-B再变化到T-C,即磁场产生了旋转。一般情况下,当步进电机的内部磁场变化一周(360°角)时,电机的转子转过一个齿距,因此,步进电机的步距角θB可表示为: θB=θM/Nr

式中,Nr为步进电机的转子齿数;θM为步进电机运行时两相邻稳定磁场之间的夹角。
步进电机细分驱动电路为了对步进电机的相电流进行控制,从而达到细分步进电机步距角的目的,人们曾设计了很多种步进电机的细分驱动电路。最初,对电机相电流的控制是由硬件来实现的,每一相绕组的相电流用n个晶体管构成n个并联回路来控制,靠晶体管导通数的组合来控制相电流。这种细分驱动电路线路复杂,体积大,成本高,而且电路一旦制造出来就难以改变其细分数,缺乏柔性,因此在目前的实际应用中已很少采用这种方法。
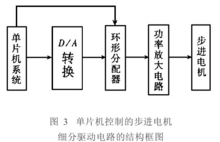
随着微型计算机的发展,特别是单片计算机的出现,为步进电机的细分驱动带来了便利。目前,步进电机细分驱动电路大多数都采用单片微机控制,它们的构成框图如图所示。单片机根据要求的步距角计算出各项绕组中通过的电流值,并输出到数模转换器(D/A)中,由D/A把数字量转换为相应的模拟电压,经过环形分配器加到各相的功放电路上,控制功放电路给各相绕组通以相应的电流,来实现步进电机的细分。2
单片机控制的步进电机细分驱动电路根据末级功放管的工作状态可分为放大型和开关型两种。放大型步进电机细分驱动电路中末级功放管的输出电流直接受单片机输出的控制电压控制,电路较简单,电流的控制精度也较高,但是由于末级功放管工作在放大状态,使功放管上的功耗较大,发热严重,容易引起晶体管的温漂,影响驱动电路的性能。甚至还可能由于晶体管的热击穿,使电路不能正常工作。因此该驱动电路一般应用于驱动电流较小、控制精度较高、散热情况较好的场合。
开关型步进电机细分驱动电路中的末级功放管工作在开关状态,从而使得晶体管上的功耗大大降低,克服了放大型细分电路中晶体管发热严重的问题。但电路较复杂,输出的电流有一定的波纹。因此该驱动电路一般用于输出力矩较大的步进电机的驱动。随着大输出力矩步进电机的发展,开关型细分驱动电路近年来得到长足的发展。
目前,最常用的开关型步进电机细分驱动电路有斩波式和脉宽调制(PWM)式两种。斩波式细分驱动电路的基本工作原理是对电机绕组中的电流进行检测,和D/A输出的控制电压进行比较,若检测出的电流值大于控制电压,电路将使功放管截止,反之,使功放管导通。这样,D/A输出不同的控制电压,绕组中将流过不同的电流值。脉宽调制式细分驱动电路是把D/A输出的控制电压加在脉宽调制电路的输入端,脉宽调制电路将输入的控制电压转换成相应脉冲宽度的矩形波,通过对功放管通断时间的控制,改变输出到电机绕组上的平均电流。由于电机绕组是一个感性负载,对电流有一定的滤波作用,而且脉宽调制电路的调制频率较高,一般大于20 kHz,因此,虽然是断续通电,但电机绕组中的电流还是较平稳的。和斩波式细分驱动电路相比,脉宽调制式细分驱动电路的控制精度高、工作频率稳定,但线路较复杂。因此,脉宽调制式细分驱动电路多用于综合驱动性能要求较高的场合。脉宽调制式细分驱动电路的关键是脉宽调制,它的作用是将给定的电压信号调制成具有相应脉冲宽度的矩形波。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国