

高性能战斗机在大攻角飞行时发生的失速/尾旋,情况十分复杂,一直严重地危及飞行安全,应该特别认真对待。据统计,美国空军从1966年至1970年出现的失速/尾旋事故占总事故的7.4%。在1965年至1970年五年间,失速/尾旋事故导至美国空军每年损失4500万美元。70年代中期,F-4鬼怪式飞机曾因尾旋事故损失170架,成为当时突出的问题。80年代初期,美国在对F/A-18A战斗机失速/尾旋试飞研究中,尽管动用了常规风洞、尾旋风洞、风洞自由飞、遥控投放自由飞、模似器等多种手段,对该飞机的大攻角特性做了反复验证,确信该飞机具有良好的抗偏离/尾旋特性,但在最后的试飞中仍有一架飞机因进入意外的偏离模态而失事。
飞机失速/尾旋的试验技术分为地面试验和飞行试验两部分,归纳起来有如下几种研究方法:
(1)尾旋风洞试验
(2)风洞模型自由飞试验
(3)旋转天平试验
(4)地面基座模拟器试验
(5)遥控自由飞模拟试验
(6)空中飞行模拟器实验
(7)全尺寸飞机飞行试验。
80年代后期开始研制旋转天平,1994年已能进行旋转天平试验,并相应地开展了尾旋模态的解析研究。1
简介旋转天平是用来获得尾旋运动中复杂气动特性的重要手段。该装置是模拟飞机在失速状态下,机身围绕某一轴旋转的同时,飞机自身同时旋转的复合运动,通过对旋转天平空气动力学数据进行测量,进而对尾旋特性进行分析研究。
还可以应用旋转天平数据和动导数进行飞机大仰角六自由度电子计算机和地面模拟器的计算模拟,可获得尾旋的时间历程,并与试飞结果获得了良好的相关性,而且应用旋转天平数据进行稳态尾旋的预测,其结果与试飞结果也相当一致。旋转天平数据不能用其他数据所代替,只能来自旋转天平的风洞试验。
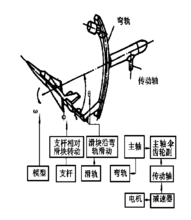
旋转天平的运动原理如图所示,由异步电机驱动减速器,通过与减速器输出端相联的传动轴以及主轴伞齿轮副使主轴旋转,产生旋转角速率,主轴通过“刚性”联接的弧形弯轨、支架、六分力应变天平使模型旋转。显然主轴的旋转角速率即为模型的旋转角速率。
在主轴旋转之前,使滑块沿弧形弯轨滑到所需的位置锁定,产生 角,再使支杆相对滑块转动到需要的角度中并锁定,由公式
角,再使支杆相对滑块转动到需要的角度中并锁定,由公式


计算出仰角 和侧滑角
和侧滑角 ,在实验中,通常是预先给定所需要的 、 ,然后计算出
,在实验中,通常是预先给定所需要的 、 ,然后计算出 、
、 ,再以此进行角度调整。2
,再以此进行角度调整。2
如图所示,旋转天平主要由下列几部分组成。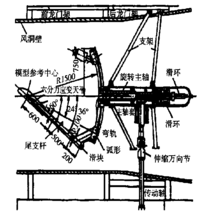
角度调整结构模型,六分力天平,支杆,滑块,变俘角机构,弧形弯轨。
主旋转体主轴联接体(内有信号放大器),主轴,轴承,滑环。
主轴驱动机构伞齿轮,传动轴,伸缩万向节,光栅,减速器,驱动电机。
配平体配平壳体,可调铅块。
主机支撑系统主轴套,可调支架,风洞外龙门架体。
模型的参考中心在各种状态下与旋转主轴的轴线基本重合。弧形弯轨使带有支杆的滑块沿弧形轨道滑动,并用销钉定位来改变 角,保证模型的参考中心始终位于旋转主轴的中心线上。在支杆的尾端有角度齿,可以改变支杆相对于滑块的转角。
角,保证模型的参考中心始终位于旋转主轴的中心线上。在支杆的尾端有角度齿,可以改变支杆相对于滑块的转角。
保证模型有足够的尺寸,因模型展长越长对实验越有利;模型有尽可能大的角度变化范围;保证模型所需的无因次旋转率的变化范围(0.05一0.2);实验雷诺数大;具有较小的支架干扰和阻塞度;具有足够的结构刚度和强度。
测控系统测控系统总体要求根据试验需求,测控系统采用分布式架构,包括试验管理子系统、运动控制子系统和天平数据采集子系统。
试验管理子系统包含多个软件模块,与其他子系统组成基于TCP/IP协议的局域网系统。旋转运动控制采用具有分布式标准结构的监视控制与数据采集(supervisory control and data acquisition ,SCADA)系统来实现,监控软件开发平台为WinCC组态软件。天平数据采集系统采用基于PXI总线技术的集成采集系统,实现静态和动态的天平数据异步和同步的数据采集。
试验管理子系统试验管理子系统是一个软件系统,负责整个试验的调度管理。它由中心调度软件、天平数据采集软件和数据处理软件系统组成。在中心调度软件的控制下运行,各软件模块通过DataSocket通信机制实现指令信息和试验数据的传递,DataSocket通信机制支持多种通信协议,并对TCP/IP标准进行了很好的底层封装,开发者不用进行底层编程,就可以在测控系统中共享和传输现场数据并发送与接收指令信息。中心调度软件采用OPC通信协议与运动控制系统实现通信连接,共同构成分布式测控局域网,从而既保障了系统的稳定运行,又确保了试验数据的安全。
试验管理子系统具有以下特点:
1)整个测控系统软件基于局域网络环境,采用分布式结构。
试验软件系统与硬件组成结构紧密联系,系统总体结构采用分布式局域网结构,由一名用户通过中心调度管理软件统一指挥,协调执行各子系统软件的相应功能,综合完成试验任务,节省了人力成本,减少操作失误。
2)各软件能够独立稳定运行。
各软件能够单独、稳定运行。一方面防止网络或个别软件运行过程中发生异常时,整个系统不会瘫痪;另一方面,试验数据的后期计算处理,如数据复算,只需要执行数据处理软件,不需要整个试验管理系统都运行,节省计算资源。
3)整个试验管理软件便于维护。
尽可能地减少软件的维护难度和维护工作量,是整个软件系统设计的出发点和最终目标。对于不同的试验任务,数据采集、运动控制和试验运行管理等方面都是相同的,而数据处理方面则随着试验类型的不同而有所不同。在设计时,笔者将数据处理软件作为开放式设计,其他软件则功能固化,整个子系统的维护工作主要集中于数据处理软件,从而实现减少软件维护的难度和维护工作量的目的。3
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国