

简介
城市轨道交通的列车自动控制系统ATC(Automatic Train Control),通常包括3个子系统:1
1、列车自动监控子系统ATS(Automatic Train Supervision)。主要作用是监督列车运行状态,实现列车运行管理自动化;
2、列车自动防护子系统,其运用的主要目的是实现列车的问隔控制、超速防护和进路的安全监控.保证行车安全;
3、列车自动运行系统ATO(Automatic Train Operation),主要完成站间内动运行和定位置停车,并能接收控制中心指令,实现列车运行自动调整。适应列车高速、高密度运行的需要。
3个子系统通过信息交换网络构成闭环系统,可以充分发挥保征行车安全,提高运行效率,缩短行车间隔,促进管理现代,提高综合运营能力和服务质量的作用。
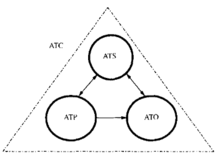
ATC系统可归结为图中所示的相互关系。ATP子系统作为保证行车安全的基础设施,示于图所示三角形的底部。ATP子系统包括车载设备和地面设备,联锁设备作为安全设施也纳入ATP子系统。1
ATS子系统作为高层次的行车指挥系统示于图所示三角形的顶部。ATS子系统通过系统内部的人机联系环节及ATP/ATO轨旁设备和站、段设备收集信息,实现列车追踪、列车进路的自动没置及列车运行调整等功能。1
ATO子系统接受来自ATP/ATS系统的地面信息和行车控制指令以及必要的人工操作实现列车加速运行、惰行、减速、停车和端站的折返作业控制。1
ATO技术发展概况城市轨道交通自动化技术经历了几个发展阶段:1
(1) 传统运行方式;
(2) ATC(列车自动控制)技术,含ATP(列车自动防护)、ATS(列车自动监控)ATO(列车自动运行)三个子系统;
(3)全自动无人驾驶方式,如法国的VAL系统、日本的新交通系统等。
最近一个世纪,高载客量、无人驾驶地铁的实施在技术上和经济上成为可能,从上世纪80年代以来,无人驾驶技术进入到了一个新阶段。它将自动控制、自动加速和在司机室速度显示器上形成的编码轨道电路组合起来,以使驾驶功能自动化,尽管在列车到站后最终的停车精确性上还有欠缺,但在提高乘客舒适度上已能达到预期的效果。2
当然,现在ATO的发展方向很宽,但归根到底可分为两种运行制式:手动或自动。在选择自动模式时,ATO系统代替司机操纵列车牵引、制动,自动的实现列车启动加速、匀速运行、减速制动等基本驾驶功能。然而,不论是由司机驾驶还是A T O自动驾驶,都需要ATP系统执行速度监督和超速防护功能,具体的操作形式为:司机人工驾驶+ATP系统=手动驾驶;ATO系统自动驾驶+ATP系统=自动驾驶。2
ATO系统功能列车自动驾驶系统(Automatic TrainOperation)是地铁车站列车集中控制系统的一个子系统,是列车自动控制系统(ATC)中必不可少的一个重要子系统。它能模拟完成驾驶列车的任务,通过利用地面信息实现对列车牵引、制动、自动折返等运行控制,使列车经常处于最佳运行状态,提高乘客的乘坐舒适度和列车的准点率,节约能源。另外,它还提供定点停车、车门控制和给车站反馈列车定位信息等功能。ATO使列车运营降低了成本、增加运营弹性,使密集发车成为可能,是城市轨道交通进入自动化时代的可靠技术保障。具体功能如下:2
(1)自动驾驶和目的制动:这是ATP和ATO装备的列车常规运行模式,3种基本的驾驶阶段是:加速(包括启动)、巡行和制动(包括惰行);
(2)开门:ATO是根据ATP的命令自动打开车门;
(3)列车由车站发车;
(4)加速;
(5)巡航;
(6)在正线上停车;
(7)限速区段运行;
(8)通过车站;
(9)车辆段向正线发车;
(10)从正线向车辆段发车;
(11)列车自动折返。
工作原理ATO子系统能保证运行时间与定点停车,还能提高运行效率,提高舒适度,减少能耗。但作为ATC的一个子系统,它的功能是要依靠ATC各子系统协调工作共同完成的,缺少ATP与ATS子系统,A T O将无法正常工作。2
从运行中所起作用来说,ATO主要实现驾驶列车的功能,能进行车速的正常调整,给旅客传送信息,进行车门的开关作业,但这只是执行操作命令,不能确保安全,这就需要ATP来进行防护。ATP起监督功能,对不符合安全的情况给予防护,保证列车不超速,车门不误动。由此可见ATP系统是列车运行时必不可少的安全保障,ATO系统则是提高城市轨道交通列车运行水平(准点、平稳、节能)的技术措施。在任何时候,只要ATP系统正常的话,就应让其执行防护工作,以确保行车安全。2
如图所示,从ATP与ATO两子系统的三条制动曲线,也可明显的看出:ATP主要负责“超速防护”,起保障安全的作用,ATO主要负责正常情况下的列车高质量地运行,其中,曲线1表示列车的紧急制动曲线,由ATP系统计算及监督,曲线2表示由ATP系统计算,在驾驶室显示出来的最大允许速度,它略低于紧急制动曲线,当列车速度达到曲线2,应给出告警,曲线3是由ATO系统动态计算的制动曲线,也即正常运行情况下的停车制动曲线。2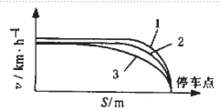
由于地铁列车的运行密度越来越大,安全性要求越来越高,所以要求有ATS系统,以使列车按照设计好的时刻表准确有序地运行,并监视列车运行状态实现智能调度。2
ATO技术特点比较20世纪90年代,国内已运用的三种制式ATO车载设备分别是北京地铁1号线的英国西屋公司的ATO设备、上海地铁1号线的美国GRS的ATO设备和广州地铁1号线运行的德国Siemens公司的ATO设备,下面就这三种设备的基本情况作一下介绍。2
地铁1号线的ATO设备(1)ATO设备
车载设备:由设在列车每一端的司机室内的ATO控制器及安装在列车每一端的司机室车体下的两个ATO接收天线和两个ATO发送天线组成。
地面设备:在各车站设备室内设有车站ATO通信器PAC(Platform ATO Communicator)。PAC内存有至下两个站的线路信息,并通过与ATS接口,得到来自控制中心的控制命令。在各车站上下行站台以及进行ATO折返的折返线出轨道上,设有Xd或者X2环路及Rd环路。列车在车站停车期间,经联锁电路及轨道电路的有关条件控制向室外环路发送。
(2)ATO需求数据和传输通道
在ATO数据的获取过程中,车载ATP接受安全信息。安全信息由列车当前运行区段的AF-900轨道电路传来,采用低频脉冲调幅方式,有8种不同的调制频率,6种用于ATP速度命令,2种用于门控命令。另外,车载TWC系统接收地面的TWC信息。该信息一般为非安全控制功能数据,诸如运行等级、列车号、目的地和跳停等。该信息采用FSK调制方式,通过地面的TWC设备向列车发送。最后,车载接受到来自车载ATP、TWC的信息和标志线圈的信息。
(3)控制策略
速度调节:ATO根据从ATP中获取的MSS和TS,计算列车运行速度曲线。该区相比较简单,只要计算加速转匀速,匀速转加速或制动的位置点,以保证列车运行时间不超过MSS,并且在每个轨道电路区段目标距离处速度不超过目标速度。控制器根据线路情况自动控制列车的牵引和制动运行输出,尽量使列车按运行曲线的速度来信。当列车速度超过目标速度时,ATP设备报警;当超过最大的允许速度时,ATP实施紧急制动。
车站停车:在车站的停车位上停车时通过X2和Xd环路来实现的,列车进入车站内的环路范围后,通过地与车之间的通信,得到距离停车点的距离,进行第一次位置调整,并使速度尽量贴近预置的停车速度曲线。在Xd环路处,进行第二次也是最后一次位置调整。若需要对运行时间进行调整,ATS将给出控制命令,如惰性控制、下一站通知等命令,由ATO执行。
上海地铁1号线ATO设备(1)ATO设备
车载设备:主要包括主控设备,车底的ATP/TWC接收环线、TWC发送天线(TWC为车—地通信系统)、对位天线、标志线圈。
地面设备:包括ATC车站停车模块以及沿每个站台布置的一组地面标志线圈。
(2)ATO需求数据和传输通道
在ATO数据获取的过程中,车在ATP接收安全信息。安全信息有列车当前运行区段的AF-900轨道电路传颂,采用低平脉冲条幅方式,有8种不同的调制频率,6种用于ATP速度命令,2种用于门控命令。另外,车载TWC系统接收地面TWC信息,该信息一般是非安全信息控制功能数据,诸如运行等级、列车号、目的地和跳停等。该信息采用FSK调制方式,通过地面TWC设备向列车发送。最后,车载ATO接收来自车载ATP、TWC的信息和标志线圈的信息。
(3)控制策略
速度调节:ATO与ATP配合调节速度。ATP共设6个速度命令,即20、30、45、55、65、80km/h。ATC系统具有4个ATS运行等级,对应于ATP的各个速度命令有相应的修正速度。参考速度就是接收到的ATP速度命令,ATS运行等级的修正速度即定点停车速度曲线三者中最小的速度。ATO根据贵旁接受的运行等级获得的运行速度信息,并调节速度、加速度和程序减速度,以符合所接收的运行等级。在检出限制速度变低并在正常的制动条件下,如果车速大于现在新的限制速度,则以制动减速度0.97m/s启动常用制动。ATO子系统利用闭环反馈技术进行跳鼠,即将实际车速与参考速度之差作为误差控制量。通过牵引或制动曲线对列车实施一定的牵引力或制动力,使误差控制量为零。
车站停车:车载ATO系统将修正程序停车取向,以符合所接收的运行等级。精确的车站停车是通过应用轨道电路ID和边界的转换以及车站的环路来实现的。应用轨道电路的ID来确定正确的停车曲线的起点。列车经过站外350米处的第一对地面标志器时,定点停车曲线便由此启动。定点停车是建立在一个固定的减速率基础上的。当ATS速度与定点停车曲线速度相同时,列车撞入定时停车控制模式,列车经过150m、25m出的地面标志器时,它离开最后停车点的距离信息被不断更新。列车经过8m出的有源地面标志器上方,并接收到由该标志器发送的信号,列车既可转为定位停车模式,实施全常制动,将车停下。车辆对位天线与地面对位天线对齐。
运行时间的调整:主要是通过选择不同的运行等级来实现。惰行模式已经包含在运行等级中。
运行模式的改变:ATC系统的逻辑要求是必须在列车停下前可以进行转换,否则将导致一次紧急制动。
广州地铁1号线ATO系统(1)ATO设备
车载设备:主要包括ATC设备机架、速度彪、控制台、ATP接收天线、PTI发送天线。
地面设备:包括车站交叉环线和PTI环线。
(2)ATO需求和传输通道
由于广州地铁采用FTGS数字频率轨道电路,因此能传送报文信息。地面传送给列车的数据信息全部经轨道电路由车载ATP接收。ATO需要的信息主要通过车载ATP获得。包括经ATP处理的信息(实际速度、运行方向、实际位置、列车长度、限速命令、制动减速度,附加信息:下一区段精度、停车位置、车站停车……),以及ATS经过ATP传给ATO的信息(车门控制、到下一站的时间、车站号、车次号、目的地号、轨道电路号)。报文由所有类型的电码按照一定的次序组成,是由轨道电路环路发送的。
(3)控制策略
速度调节:ATO接收来自ATP的带四个标志点的速度命令信息(包括最大速度、第一限速、第二限速和入口速度的起点、终点、速度值),计算列车要求的运行速度。ATO按照时刻表和运行需要提供三种模式曲线:最大允许曲线,常规速度曲线(较最大速度曲线下降10%),节能速度曲线(较最大速度曲线下降20%):然后根据各种线路情况、车辆信息,计算所需牵引力或制动力,使列车到达最大加速度,总比ATP的最大允许速度曲线低一点。当超过警告曲线、则警告。
车站停车:车站内的位置调整点有多交叉的环路提供。相对应的车站中间的环路交叉是用来确定距离的,一般的距离是6个枕木之间。另外还定义一些粗调点,它们之间的距离减少至3个枕木间距且3个一组。ATP车载设备能接收到这些交叉点,并能把每个交叉点的处理信息传给ATO。ATO计算每个交叉点间的距离,粗调点只有在期望的位置窗口内才能被识别到。假如识别到粗调点,则下一个交叉点便可用作为之同步。这些交叉点的位置以预置在ATO中。
惰行/巡航使ATO的一项辅助功能。时间充裕的话,可采用巡航/惰行来调整运行时间,节省能源。
正线上改变运行模式:在列车运行中的任一时刻,司机可以通过移动操纵杆使之脱离零位置,从而进行人工驾驶。在任何时候和任何驾驶阶段,ATO给出可以进行驾驶的显示,司机通过移动操作杆,使之进入零位置并按压ATO启动键,列车运行模式变为ATO模式。
展望目前,城市交通的理想特征是:在规划上具有科学性,超前性,合理性,可调整性;再法律上具有权威性,连续性;在建设方面具有资金保障,技术先进,时机恰当的特点;在管理上具有现代化,高效率,低成本,应变强的特点。在自动驾驶系统(ATO)上,国外已研究适用于高密度城市轨道交通的列车驾驶系统,并在城市轨道交通系统中广泛应用。我国在此项技术上研究较少,为了降低地铁投资,迫切需要国内具有自主产权的适用于城市轨道交通的列车自动驾驶系统。2
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国