

运动控制
运动控制系统是对机械运动部件的位置、速度等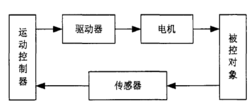 进行实时控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动的系统川。它主要包括运动控制器、驱动器、执行机构以及反馈系统几个部分,如图1所示。运动控制器是指以中央逻辑控制单元为核心,以传感器为信号敏感元件,以电机/动力装置和执行单元为控制对象的一种控制装置,其主要任务是根据作业的要求和传感器件的信号进行必要的逻辑数学运算,为电机或其它动力和执行装置提供正确的控制信号。1
进行实时控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动的系统川。它主要包括运动控制器、驱动器、执行机构以及反馈系统几个部分,如图1所示。运动控制器是指以中央逻辑控制单元为核心,以传感器为信号敏感元件,以电机/动力装置和执行单元为控制对象的一种控制装置,其主要任务是根据作业的要求和传感器件的信号进行必要的逻辑数学运算,为电机或其它动力和执行装置提供正确的控制信号。1
背景网络化多轴运动控制依据结构可分为集中式结构和分布式结构两种。网络的实时性是其应用在工业自动化领域的软肋,而多轴运动控制的协调对控制精度要求的苛刻使得对网络的实时性要求更高。采用集中式控制结构不仅需要在网络传输实时的控制信号还要传输位置反馈信号,无疑加重了网络的压力。而采用分布式控制结构,只需在网络传输少量的运动控制指令和同步信息,因此对网络的带宽和实时性的要求有所降低。同时分布式控制结构方便扩展,使得控制系统灵活性增强。使用分布式控制结构是网络化运动控制系统的发展趋势。1
简介集中式运动控制在集中式结构中,每个轴的位置环位于运动控制器中,从而组成基于网络闭环的控制系统。在每个控制周期,运动控制器通过控制网络接收各个轴的位置反馈,计算每个轴的速度给定值并通过网络发送给各个伺服控制器。集中式控制结构的主要应用场合是CNC、机器人等设备。由于位置控制算法集中在运动控制器内实现,因此可实现比较复杂的控制算法,如可通过采用交叉祸合控制方法补偿各运动轴动态特性的差别和扰动,从而有效减小同步误差。但网络闭环产生的延迟和抖动也会影响系统的稳定性和控制性能,必须在控制算法设计时加以考虑。集中式控制结构对控制网络带宽也有较高的要求。
分布式运动控制在分布式结构中,每个轴的位置环位于伺服控制器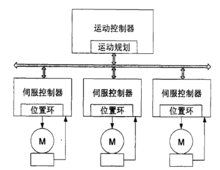 中,不构成网络闭环。分布式运动控制结构如图2所示。每个运动轴的位置环和速度环都位于伺服控制器内。分布式控制结构的主要应用场合是印刷、包装生产线等设备。这类设备中往往有大量数目的运动轴,采用集中式控制是不合适的。由于控制算法分散在各伺服驱动器内实现,从而降低了通信需求,增加系统的可靠性。1
中,不构成网络闭环。分布式运动控制结构如图2所示。每个运动轴的位置环和速度环都位于伺服控制器内。分布式控制结构的主要应用场合是印刷、包装生产线等设备。这类设备中往往有大量数目的运动轴,采用集中式控制是不合适的。由于控制算法分散在各伺服驱动器内实现,从而降低了通信需求,增加系统的可靠性。1
特点分布式运动控制相对于传统的集中式运动控制,具有如下一些特点。
(1) 独立数据处理。每个模块单元在运动学和动力上应具有相对的独立性。如在机器人的运动学和动力学中,各单元之间的耦合非常强,为了实现模块化设计,应尽可能保证模块在运动学和动力学上的独立性,可以考虑通过模块来分别调整机器人的各运动学参数。
(2) 独立驱动。每个主动模块应具有驱动能力,完成特定的运动和动作。如在机器人结构中,每个主动单元就是实现一个或多个自由度的关节或运动单元。为了减少在模块问的机械运动传递,因此每个主动模块都有自己的驱动系统。2
分布式运动控制策略运动控制系统的任务是使执行机构按照预期的运动轨迹和规定的运动参数进行运动,而分布式运动控制系统的主要任务是通过网络来实现多个执行机构的协调控制。下文以以太网为例,简述了运动同步控制、网络时钟同步和网络流量控制三个方面的控制策略,在网络通用性前提下解决网络的实时性,使其满足分布式运动控制的需求。
运动同步控制为了满足网络的通用性要,使用交换式以太网组建分布式运动控制系统。使用交换机划分冲突域的方式虽然很好的解决了以太网数据包的冲突问题,然而它也增大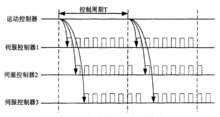 了数据包的网络延迟。
了数据包的网络延迟。
如图3为采用事件触发的分布式控制示意图。由于控制命令从运动控制器到每个伺服控制器的网络延迟都存在差别,即使使用广播方式发送数据,命令到达各个伺服控制器的时间也各不相同,因此驱动控制器接收到控制命令后输出指令脉冲序列的时间也各不相同。显然在这种方式下多轴电机运转形成的轨迹和目标轨迹会产生偏离。
如果在控制命令中添加执行时间信息,驱动控制器接收到插补数据后不是马上发出指令脉冲序列,而是到达指定执行时间后再发出指令脉冲。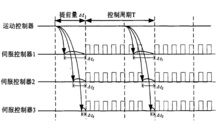 按照这种方式,只要保证各个控制器时钟完全同步,指令脉冲序列发出的时间就会完全相同。为了保证指令在控制周期内发出,插补数据需要提前一段时间发出,驱动控制器收到数据后需要设置定时器,在指定时间到达之后才能执行脉冲指令。将预先设置定时器,在定时器时间达到时执行任务的机制称为定时触发机制。
按照这种方式,只要保证各个控制器时钟完全同步,指令脉冲序列发出的时间就会完全相同。为了保证指令在控制周期内发出,插补数据需要提前一段时间发出,驱动控制器收到数据后需要设置定时器,在指定时间到达之后才能执行脉冲指令。将预先设置定时器,在定时器时间达到时执行任务的机制称为定时触发机制。
如图4所示为使用定时触发机制进行分布式插补的示意图。插补数据包提前 时间发送。三个伺服控制器接收到数据包之后分别以
时间发送。三个伺服控制器接收到数据包之后分别以 、
、 和
和 时间定时。最后各个伺服控制器的指令脉冲序列发出的时间完全同步。
时间定时。最后各个伺服控制器的指令脉冲序列发出的时间完全同步。
显然,使用定时触发机制来实现网络同步,必须实现网络时钟同步。
网络时钟同步网络时钟同步是分布式运动控制系统的基础。在保证了时钟同步的基础上才能保证定时触发机制的正常工作。运动控制网络的时钟同步与一般信息系统的时钟同步有很大的不同,最主要的差别是运动控制网络所要求的同步精度往往在微秒级甚至亚微秒级,这是一般信息系统中所采用的时钟同步机制无法达到的。现有的时钟同步方法通常在同步控制网络中实现,其确定性的机制较利于时钟调整算法的实现。然而,在异步网络中,介质存取控制机制的不确定性导致同步周期存在着抖动,从而为提高时钟同步精度增加了难度。
网络流量控制分布式插补会产生大量的插补数据需要通过网络传输。为了有效的利用网络带宽,提高传输效率,将多个分段的插补数据放在一个报文中传输,这样驱动控制器必须将多个分段先存储在缓存区中。在嵌入式系统中,缓存区的大小是有限的,因此通常采用扩展外部RAM的方法扩充缓存区。然而访问外部RAM的时间较长,要保证高速插补的持续进行,数据需要放在微控制器的片内RAM。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国