

发展背景
静电陀螺仪是一种球形转子自由陀螺仪,它的基本概念是在美国大力发展战略核潜艇的时代,由伊利诺斯大学诺尔西克教授于1954年向美国海军研究办公室提出来的。他提出的方案是赤道上带土星环的空心球转子框架式静电陀螺仪.它对转子式不施矩的。因此出了漂移外,转子主轴和壳体对应的轴将在惯性空间保持形同的姿态。这实质上是一种二自由度框架式陀螺仪.后来经过研究改为现在的球形转子自由陀螺仪。
1955年美国海军正式立项开始研究,Honeywell公司、GeneralElectric公司以及Arma公司很快也加入了该项目。Rockwell跨国公司的Autonetics分公司是1959年开始研究的.在早期的研究中,只有Honeywell公司和Autonetics分公司的工作最后实现了导航产品。
在这中间,美国静电陀螺仪研究经历的曲折的发展道路。在20世纪50~60年代,液浮陀螺导航系统占据了舰船惯性导航系统的统治地位。静电陀螺仪项目当时并未被海军选用,因此在这期间,Honeywell公司和Autonetics分公司都致力于开发全姿态输出静电陀螺仪,研发捷联式静电陀螺仪导航系统,企图应用于航空和航天领域,但始终未成为装备3。
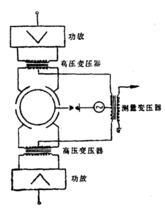
工作原理图1介绍静电支承系统的工作原理。球形转子安装在支承电极的球腔之中。图上只画出一路,实际上同样的系统共有三路。整个电极球腔分割为12块等面积的电极。当转子偏离电极中心时,在相应的两块电极上将同时接通正和负等幅度的控制电压,使转子回到电极中心位置,同时转子始终处在地电位,从而解除了三路支承之间的藕合关系。
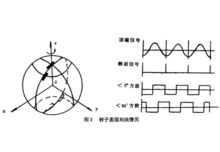
转子的姿态角通过光电信号器转换为电信号。图2为转子表面上刻线的情况。在转子极点的一侧刻有矩形图线,当转子的极点偏离顶端光电信号器时,将有转子自转频率的正弦波信号输出,其幅度和偏角的大小成正比。侧面刻线由侧面光电信号器观测,产生脉冲信号,作为检相器参考方波的相位基准。经过上述信号变换,静电陀螺仪将给出两路直流信号,成为一个二自由度的位置陀螺仪。
静电陀螺仪具有加转和阻尼线圈。在陀螺启动之后,这些线圈不再接入加转和阻尼电流,而是作为加矩线圈使用。如图3所示,如果把顶端和侧面的光电信号送入加矩控制线路,则可以把陀螺转子锁定在顶端光电信号器的零位上。这时静电陀螺仪成为一个二自由度的速度陀螺仪。加矩线路还可量测和补偿陀螺的漂移。
综上所述,静电陀螺仪具有支承系统,光电信号器和磁场力矩器等三个主要部件。此外为了保证正常工作,还需要有真空维持,温度控制和外磁场屏蔽等装置1。
国内外研究成果国外研究成果国外研制静电陀螺仪的只有美、苏、法三个国家。在文献中,对美国的研制过程和产品水平报道较多,可以代表目前国外的技术水平。苏联和法国也有不少研究报告发表,但是没有关于产品及精度的报道。
在美国,静电陀螺仪是在1954年提出研制的,由美国海军科研局(ONR,OfficeofNavalReseareh)资助,目的是用于核潜艇的惯性导航。经过原理样机研制阶段,到60年代初开始转入型号产品的研制,主要由RoekwellInternational公司的Autoneu一tios分部和Honeywen公司两个厂家承担,分别研制实心转子和空心转子的静电陀螺仪。
实心转子静电陀螺仪是在1964年开始研制的,被转子的直径为10毫米,采用转子质量不平衡的方法来建立陀螺仪的信号器。1967年这种陀螺仪被用来建立捷联式飞机惯性系统,型号先后有N57,N73和N73H等,但未被空军采用。
1969年该公司把这种陀螺仪组成平台式惯性系统。1974年美国海军根据长时间试验的优异结果决定在三叉戟级核潜艇上采用,型号为ESGM(静电陀螺监控器),首批生产了14套。ESGM作为潜艇内部的定位基准,用于修正液浮陀螺船用惯性系统,使得潜艇需要获得外部定位信号的时间间隔由原来的4天延长到40天以上。这种ESGM/s工Ns组合式导航系统显著地提高了核潜艇的隐蔽性,因而在核潜艇,包括攻击型核潜艇中,普遍得到应用。
空心转子的静电陀螺仪是Honeywel公司在1962年开始研制的。1967年研制成功平台式飞机惯性系统,型号为AN/AS一130,AN/ASN一136等,目前统称为GEANS型。这种陀螺仪采用直径为38毫米的空心被转子和光电信号器。这种惯性系统早期的精度为0.15海里/小时,被美国空军选用于B一52H、B一1等型号的飞机,称为标准精密导航仪(SPN),已生产800套以上。1983年试飞的结果表明,这种惯性系统在12小时连续飞行中,定位误差仅为48米,相当于0.02海里/小时。这是目前精度最高的飞机惯性导航系统。据该公司介绍,空心转子静电陀螺仪与g无关的漂移误差小于0.0002度/小时;与g和92有关的漂移误差系数分别小于0.。。02度/小时/g和0.0002度/小时/g平方。由于静电陀螺仪与加速度有关的漂移误差系数非常小,在飞机等加速度和振动干扰较大的载体上,采用静电陀螺仪可以显著地减小机动飞行造成的惯性系统误差。这是GEANS被美国空军选用的原因之一。
70年代中期,人们开始把惯性系统用于大地测量。美国国防测绘局(DMA,De一fenseMappingAgency)选择GEANS系统作为大地测量和地球重力场测量的仪器。在软件作相应的改造之后,这种系统的型号称为GEO一SPIN,意思是大地测量用的标准精密惯性导航仪。根据1953年Honeywell公司的介绍,这种系统在30一60公里的测线上,定位误差仅25~50厘米,相当于一等测量控制点的精度,。西德等国的军事部门曾采用GEO一SPIN系统进行山区重力场的测量,重力异常值测量精度为3毫伽,垂线偏差角的测量误差小于1角秒。这种系统是目前唯一可以同时定位和测量重力的仪器。尤其可贵的是,在GEO一SPIN中静电陀螺仪租挠性加速度计的误差系数只需要每年校准一次。这充分表现出静电陀螺仪误差的长时间稳定性。
静电陀螺仪的弱点是承载能力受到电场击穿场强的限制,通常小于30g。由于转子加转过程中将受热,一般静电陀螺仪选择工作温度稍高,并要求较严格的温度控制。此外陀螺启动时不可避免地会产生章动,需要一定的时间加以阻尼。这些特点使得静电陀螺仪不宜用于战术武器,应当用于高精度长时间工作的场合1。
国内研究成果1965年我国确定研制静电陀螺仪,由清华大学等单位承担。1965~1971年原理样机研制成功,1971一1980年转入应用研究阶段,并在1976年研制成功静电陀螺三轴稳定平台,在飞机上进行了13次飞行试验。在海洋重力仪稳定平台,浪高仪平台等多种产品中,静电陀螺仪得到了海上试验的考核,证明静电陀螺仪完全可以满足飞机和船舶的环境条件。1985年静电陀螺仪通过了部级技术鉴定,长时间工作的精度达到了相当高的水平,并有较大的潜力1。
未来发展展望静电陀螺仪是目前精度最高的陀螺仪,而且适用于长时间工作的环境,因而在核潜艇和远程飞机上已经得到普遍应用。
美国Stafnord大学在NASA的支持下目前正在研制卫星上用的静电陀螺仪,准备在1990年把载有4只实心石英转子的静电陀螺仪装入卫星送入轨道,整个计划称为“GP-B”计划(意指重力试验计划),目的是量测广义相对论效应下陀螺仪的进动。由于这种进动速度的理沦计算值非常小:
(1)在卫星轨道平面内为6.9角秒/年;
(2)在地球赤进平面内为0.044角秒/年。这种静电陀螺仪的漂移误差应当小于0.3x10^(-6)角秒/年,相当于3X10^(-11)度/小时。
Stanford大学的GP一B计划1985年得到了NASA的巨额经费,并与Lockheed导弹公司合作。应当指出,他们所研制的静电陀螺仪将来可以用在卫星和航天飞行器上,作为惯性坐标系的基准。联系到美国正在大力开展星球大战计划,重视这一项目看来不仅是为了研究广义相刘浦仑效应的实验1。
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国