

物体的形状识别是1模式识别的重要方向,在计算机中物体的形状有多种表示方式,基于不同的形状表示方式,提出了多种形状识别方法,如基于傅里叶描述子、主分量分析、不变性距等方法。在形状识别中,识别所基于的模式特征非常重要。
随着多媒体技术、计算机通信技术及网络的迅速发展,人们在生活中广泛地应用性能俱佳的电子设备,也接触到更多的需要去处理的数字图像信息。
数字图像的识别技术已经日益广泛应用在我们生活和工作中各个方面安全等等。因此,图像目标识别具有重大研究意义,获得的研究成果应用前景非常广阔。分析研究形状识别在图像目标识别中发挥出重要作用,形状特征匹配的好差直接决定了目标识别的效果。
形状识别的一般流程形状识别的一般流程:形状提取、形状特征提取和分类识别。
一、形状提取形状提取的处理流程:
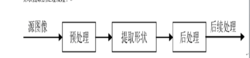
1、预处理:
A、图像的灰度变换是图像增强处理技术中一种非常基本、直接的方法,它主要针对独立的像素点进行变换处理,而无须考虑其它因素,在处理时通过改变原始图像数据所占据的灰度范围而使其灰度分布满足一定的要求,并且丝毫不会改变图像像素点之间的相互空间关系。常用的方法主要有三种:
1)灰度级修正
针对图像成像不均匀(如曝光不均匀,使图像半边暗半边亮),对图像逐点进行不同程度的灰度级校正,目的是使整幅图像灰度均匀。
2)灰度变换
针对图像某一部分或整幅图像曝光不足而使用的灰度级变换,其目的是增加图像灰度对比度。常用的灰度变换方法有图像反转、线性灰度变换、分段线性灰度变换、灰度窗口变换等,如图:

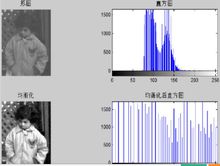
3)直方图修正
能够使图像具有所需要的灰度分布,从而有选择地突出所需要的图像特征,来满足人们的需要。灰度级的直方图就是反映一幅图像中的灰度级与出现该灰度概率之间关系的图形。直方图的均衡化就是一种常用的直方图修正法,它通过把一已知灰度分布的图像经过一种变换,使之演变成一幅具有均匀灰度概率分布的新图像。
B、图像平滑是一类局部预处理方法,主要用于抑制图像噪声,它利用了图像数据的冗余性。局部图像平滑可以有效地消除冲击噪声或表现为窄带的退化。新值的计算基于某个邻域中亮度的平均。平滑有造成图像中明显边缘变的模糊的问题,因此我们将集中考虑能够保持边缘的平滑方法。
1)邻域平均法
2)中值滤波
2、形状提取(分割):
通过分割区域来提取形状主要是基于区域的某种“一致性”,在实际图像中,如:灰度,纹理,光流等分布的一致性。这种一致性构成的特征可用于区分图像的各个区域。
1)基于边缘检测的方法
图像边缘是图像最基本的特征,边缘在图像分析中起着重要作用。所谓边缘,是指图像局部特性的不连续性。灰度或结构等信息的突变处称为边缘,例如:灰度级的突变、颜色的突变、纹理结构的突变等。
从本质上说,边缘常常意味着一个区域的终结和另一个区域的开始。 边缘检测的实质是采用某种算法来提取出图像中对象与背景间的交界线。图像灰度的变化情况可以用图像灰度分布的梯度来反映,因此可以用局部图像微分技术来获得边缘检测算子。经典的边缘检测方法是对原始图像中像素的某小邻域来构造边缘检测算子。
边缘检测的原理是:由于微分算子具有突出灰度变化的作用,对图像进行微分运算,在图像边缘处其灰度变化较大,故该处微分计算值较高,可将这些微分值作为相应点的边缘强度,通过阈值判别来提取边缘点,即如果微分值大于阈值,则为边缘点。
2)基于阈值选取的方法
阈值法是一种传统的图像分割方法,因其实现简单、计算量小、性能较稳定而成为图像分割中最基本和应用最广泛的分割技术。图像阈值分割利用了图像中要提取的目标物与其背景在灰度特性上的差异,把图像视为具有不同灰度级的两类区域(目标和背景)的组合,选取一个合适的阈值,以确定图像中每一个像素点应属于目标还是背景区域,从而产生相应的二值图像。
1. 整体阈值法:
它是用一个全局阈值来实现图像二值化。该方法对质量较好的图像(如双峰直方图)有效。这种方法运算简单,易于理解,但适应性不强。
2. 局部阈值法:
由当前象素灰度值与该象素周围点的局部灰度特征来确定图像的阈值。常把原图像划分为不相交的小块,将各块图像的灰度值作为该部分图像的阈值。这种方法可处理质量较差的图像。
3. 动态阈值法:
它是局部阈值法的改进方法。它的阈值不仅仅取决于该象素及其周围象素的灰度值,还和该象素的位置有关。这种方法适应于图像质量不好的图像的二值化,但它运算量大,运算速度慢。
3)基于区域生成的方法
阈值分割可以认为是将图像由大到小进行拆分,而区域生长则相当于有小到大对像素进行合并。区域生长的基本思想是将具有相似性质的像素集合起来构成一个区域。实质就是将具有“相似”特性的像素元连接成区域。这些区域是互不相交的,每一个区域都满足特定区域的一致性。具体实现时,先在每个分割的区域找一个种子像素作为生长的起始点,再将种子像素周围邻域中与种子像素相同或相似性质的像素(根据某种事先确定的准则来判定)合并到种子像素所在的区域中。直到所有满足条件的像素都包括进来了,一个区域就长成了。 实际应用区域生长法时,需要有以下 3 个步骤:
(1)确定选择一组能正确代表所需区域的起始点种子像素。
(2)确定在生长过程中将相邻像素包括进来的准则。
(3)确定区域生长过程停止的条件或准则。
3、提取后处理:
形态学运算是针对二值图像而依据数学形态学(MathematcialMorpholgoy)的集合论发展起来的图像处理方法。
二、形状特征提取过图像的前期处理,我们获得了目标的形状,为了进一步对目标做分析和识别,必须通过对目标的形状作定量和定性的分析来得出正确的结论,这些结论是建立在目标形状的某些特征描述的基础上的。为了识别某一目标,我们必须对目标的形状进行描述,即提取形状的某些特征来表示该目标。为了能区分不同形状的物体,保证识别的正确性,我们希望这些特征相对不同的形状有较大的差异,而对同一物体,对其在图像中的不同位置、大小和方向的变化保持不变,即具有平移(Translation)、旋转(Rotation)、尺度(Scale)不变性(RST不变性)。
好的描述具有如下性质:
1)宽域:能描述许多类的实体;
2)唯一性:对域中每个不同的成员有唯一的表达;
3)数据保持性:即能根据描述恢复出初始形状的真实表示;
4)稳定性:小的扰动不会使描述产生大的变化;
5)简易性:实现简便,实时性。
1、基于全局的简单几何性特征:
面积、周长、长轴、短轴、主轴方向、凹凸面积、紧密度、实心度、偏心率。
1)离心率:区域的离心率定义为它的主轴和短轴的比,它区分不同宽度目标的能力比较强。长而窄的物体和短而宽的物体偏心率差别很大。
2) 实心度:当形状有一个或多个明显的凹凸时,实心度就是一个非常有用的特征,可以刻画一个区域的凹凸性。任意集合O的凸壳H就是包含集合O的最小凸包,实心度定义为在H同时也在集合O中像素的数目的比率。实心的目标和空心的目标在实心率上差别很大。
3)紧密度:紧密度是在一定程度上描述区域紧凑型的全局性形状测度,由

给出。当形状为圆时,紧密度为最小值1,它是一个旋转、尺度、平移不变量,又是一个非矢量的数值。
2、基于变换域的特征:
矩、Fuorier描述子、小波描述子
1)矩
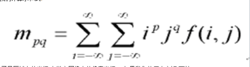
区域的矩表示把一个归一化的灰度级图像函数理解为一个二维随机变量的概率密度。这个随机变量的属性可以用统计特征—矩(Momnet)来描述。通过假设非零的像素值表示区域,矩可以用于二值或灰度级的区域描述。(p十砂阶矩不依赖于尺度、平移、旋转、甚至灰度级上的变换,由下式给出:

在数字图像中我们计算求和式:
其中x、y、i、了是区域点的坐标(在数字图像中的像素坐标)。如果我们使用中心矩,可以
取得平移不变性,
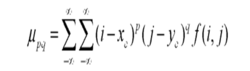
其中xc和y。是区域重心(质心)的坐标,它可以有下面的关系来得到:
在二值情况下, m00表示区域面积。尺度不变性的特征也可以在尺度中心矩ηpq中得到(尺度变换x`=αx,y`=αy)。
由上式求出一组归一化的中心矩ηpq,通过代数恒等变换,我们可以求得下式的一组7个具有RST不变性的特征(注意Ф7只具有ST不变性):

2)边界Fourier描述子:
假设C是复平面上的封闭曲线(边界)。以逆时针沿着这个曲线保持恒定速度移动,得到一个复函数z(t),这里t是时间变量。速度应该选择为使得环绕边界一周的时间为2π;然后沿曲线做多次遍历得到一个周期为2π的周期函数。这就允许Z(t)的傅立叶表示:
级数的系数Tn称为曲线C的傅立叶描述子。
考虑将曲线距离、对照于时间会更有用。其中L是曲线长度。
傅立叶描述子Tn由
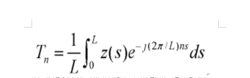
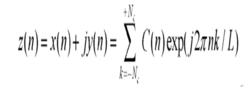
给出。描述子受曲线形状及曲线初始点的影响。对于数字图像数据,边界坐标是离散的而函数或Z(t)不是连续的,这样当采用直角坐标表示时,一条由(2Nc+l)个采样点组成的长度为L的封闭曲线,可用下面的傅立叶级数表示:
图像分类识别根据图像的不同特征对图像进行分类,有相同特征的归为一类。图像识别方法随着数学算法的不断进步而不断发展。目前,图像分类识别的主要方法有六种:模糊集识别、统计识别、神经网络识别、结构识别、魔板匹配和支持向量机。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国