

基本思想
主动视觉的主要思想,是根据视觉感知任务的要求或外部刺激,系统主动地改变传感器(摄像机)的内部参数(焦点、焦距、光圈、聚散度等)及外部参数(位置、方向、光源条件等),以达到简化视觉计算,消除景物解释的歧义性,实现实时感知的目的。主动视觉的机理更接近人的视觉系统,例如人在观察时,要不断地转动眼球,甚至转动头部或移动身体的位置,以调整视线和注意点。
传统的计算机视觉理论(以著名学者马尔(D.Mar)为代表),把视觉过程看成一个信息处理的过程,侧重于研究如何从景物的二维图像,通过由低到高的分层表示和模块化的视觉计算,最终获得三维景物的精确几何描述和景物中物体性质的定量描述。由于三维景物的成像过程非常复杂,景物中物体的几何形状、表面反射特性,以及光源、物体与摄像机间的空间关系等诸多因素都将对二维图像中像元的灰度值产生影响;另外,成像过程中还会引入噪声、畸变以及遮挡等问题。因此作为成像过程的逆过程,从原始的二维图像获取三维景物精确的描述是非常困难的任务。1
主动视觉系统构成方式主动视觉通过控制视觉系统中的摄像机进行运动和调整相关参数,改变摄像机的位置和方向 (位姿),实现对目标的跟踪,构成主动视觉系统的主要方式有:
1、将摄像机放置于可以在水平和垂直方向旋转的云台上,通过控制云台的转动实现摄像机方向的改变。
2、使用主动摄像机使摄像机完成水平和垂直方向上一定幅度的旋转,也可以对摄像机的焦距进行调整。
3、通过模仿人类眼睛的构成方式,设计主动视觉系统平台,通过平台上相应的电机驱动摄像机在水平和垂直及左、右方向上转动,此类系统一般都是模仿人类的双目 “头—眼”系统,基本的运动方式相同,只是在双目构成、转动控制机构和控制精度上有所区别。
工作过程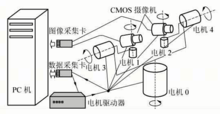 双目主动视觉系统是智能机器人的一部分,一般该系统由一台高性能PC机、两台CCD或者CMOS摄像机、5台直流伺服电机、一块PCI接口的高速双通道图像采集卡、一块PCI接口的数据采集卡、电机驱动电路 (包含电源)组成,如右图所示,该双目主动视觉系统共有5个自由度,可以模仿人的双眼运动,也即左、右摄像机(相当于人的两个眼球)可以上、下、左、右运动,同时整个系统可以像人的颈一样作旋转运动。
双目主动视觉系统是智能机器人的一部分,一般该系统由一台高性能PC机、两台CCD或者CMOS摄像机、5台直流伺服电机、一块PCI接口的高速双通道图像采集卡、一块PCI接口的数据采集卡、电机驱动电路 (包含电源)组成,如右图所示,该双目主动视觉系统共有5个自由度,可以模仿人的双眼运动,也即左、右摄像机(相当于人的两个眼球)可以上、下、左、右运动,同时整个系统可以像人的颈一样作旋转运动。
1、图像采集部分选择两台CMOS彩色摄像机,CMOS具有低功耗、高灵敏度、低噪点、高集成度、高动态范围、高数据读取和处理等优点,在固体图像传感器中得到了越来越广泛的使用.随着CMOS(互补金属氧化半导体)制造工艺的不断发展,CMOS摄像机获取的图像质量也在不断提高,已经成为CCD (电荷耦合器件)摄像机之外的一种很好的选择.图像采集卡将模拟视频信号滤波并且完成A/D转换后,直接通过PCI总线传入PC机内存,传送速度高,实时性好。
2、数据采集部分选择数据采集卡,用于将PC机计算出来的控制量输出到伺服放大器驱动电机,同时将编码器的反馈信号输入到PC机,数据采集卡采用PCI总线,可以直接插在PC机内的任一个PCI插槽中,构成数据采集和处理系统。PCI板上一般装有100kHz、12bit的A/D转换器和D/A转换器,提供了8双/16单的模拟量输入通道和2路模拟量输出通道;支持软件查询方式、中断方式,两种方式的传输率均可达到100kbps;PCI总线宽度为32bit,同步工作频率可达到33MHz,最高传输速率为132Mbps.
3、所有计算均在一台PC机上完成。
4、直流伺服电机要有体积小、高速、噪音极低、带光电脉冲发生器的特点,用于控制视觉系统的5个自由度。
在视觉系统中,摄像机不断地获取外部环境的图像,通过图像采集卡输入PC机中,视觉模块 (目标检测与跟踪)对图像进行处理得到运动目标的位置等信息,并且传送给主动视觉系统的运动控制机构,控制命令通过数据卡、电机驱动电路控制视觉系统的电机驱动摄像机转动,将目标保持在摄像机图像平面的中央,从而实现闭环视觉跟踪控制。目标检测与跟踪是低层视觉功能,目标识别属于高层视觉功能.跟踪的目标保持在图像平面的中央位置,使得到的感兴趣图像最清晰,为识别打下良好的基础.检测与跟踪、识别程序是在两个独立的线程中完成的,两个线程之间存在着协调关系,多线程系统模式使得在跟踪的同时也可以进行识别,视觉系统采用动态look-and-move视觉伺服工作方式,即图像处理和系统控制可以同时进行,从而保证了系统的动态性能。2
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国