

背景
无人机(UAV)是一种由人在地面或母机上进行遥控的飞行器,上面装有自动驾驶仪、程序控制系统、遥控与遥测系统、自动导航系统、自动着陆系统等,通过这些系统实现远距离控制飞行。由于无人机具有机动灵活、无人员伤亡、·空勤保障简单、必要时可与敌人同归于尽等优点,所以它在现代高技术局部战争中发挥着越来越重要的作用。但是无人机缺少飞行员,飞机出现故障时,缺少人的智能决策能力,容易造成任务失败。对于空军力量强大的对手而言,目前现役的主战飞机都具有良好的机动性能,一旦被发现,将对无人机构成极大威胁,极易被攻击而造成损伤。从国内外高可靠性飞行控制系统发展来看,为保证无人机能够可靠地完成侦察、监视等任务,要求无人机的飞控系统具有高可靠性、高生存力,以最大限度地保证无人机和设备的安全。
无人机最先应用于军事,但由于其具有机动性强、灵活性高、成本低廉等特点,各国相继大力开展了民用无人机的研发和使用。因此,无人机被作为一种理想的飞行平台广泛应用于航拍测绘、通信中继、抢险救灾等各个领域。但是,由于无人机飞行情况复杂且易受外界环境干扰,飞行过程中不免会产生故障。其中GPS失效就是一个常见问题,由于GPS失效后无人机无法正确找到经纬坐标,导致无人机不能顺利返航,因此研发针对GPS失效等一系列故障的应急处理技术是目前乃至今后一段时间无人机研究领域的热点。
失控返航过程飞行器在飞行过程中,前视避障的摄像头会对场景地形进行实时扫描,并通过获取的障碍物位置信息来构建
3D地形图。
如下动图中,飞行器穿过城市楼宇抵达拍摄地“球形歌剧院”,成功完成“环绕航拍”后飞向下一拍摄目标。
当飞行器抵达楼宇背面时,控制信号被遮挡,遥控器中断,飞行器悬停6秒触发“失控返航”。
飞行器会参考原路径返航,并通过前视避障已构建的地形图,进行路径规划。若按已规划的路径返航1分钟内,重新获取信号,飞行器进入悬停状态,等待遥控器控制指令。1
天地飞9失控返航设置(1)遥控器设置为固定翼模式,设置好后,关机,再按正常开机,进入菜单列表找到辅助通道设置;
(2)进入辅助通道设置菜单。将手中的遥控器和图上设置完全一致。这里分别对飞控的飞行模式等相关通道进行设置,也还可以根据自已的使用习惯进行设置。
(3)返回到上一级菜单选择到舵角设置,把起落架和襟翼2个选项的数值按下述参数值设置为68%,完成设置退出到上一级菜单。
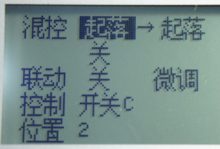
(4)返回上一级菜单切换到高级设置,选择到可编程普通混控1。
(5)按下列参数进行设置,该设置是对一键返航进行设置并设置(关于返航相关细节与注意事项查看相关说明书。)如果需要暂时屏蔽该功能将第2排的关设置为禁用即可。其中:控制开关C指的是用哪个开关来进行一键返航操作,这里指定的是用C键,位置2指的是的开关C扳在哪个位置时开启开一键返航时,0位置为正常飞行2位置为启动返航。可根据自已的习惯自已设置,如果你选择开关C以及其工作位置时,下图的第二行的模式“开、关、禁用”中开或关无法选择,说明遥控器上开关C的扳位不正确,需将它扳回来。2
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国