

挠性陀螺仪基本结构
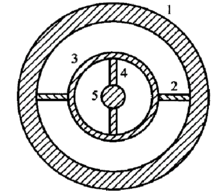
挠性陀螺仪主要由陀螺转子、挠性接头、驱动电机、信号器和力矩器五大部分组成。
陀螺转子为外缘向下延伸成环形凹槽的圆盘;挠性接头一般采用整体式动力调谐式挠性接头;驱动电机是一个磁滞马达,其转轴便是转子的自转轴;信号器由对称安装、反向串联的两个线圈及有关磁路组成;力矩器用来沿两进动轴对转子施加修正力矩或补偿力矩。1
挠性陀螺的基本原理挠性陀螺仪在工程上较多采用单平衡环挠性转子动力调谐陀螺仪,其挠性接头配置如下图所示。
挠性接头由相互垂直的内外挠性轴和一个平衡环构成,内挠性轴由一对内扭杆组成,外挠性轴由一对外扭杆组成,内挠性轴将驱动轴与平衡环相连接,外挠性轴将平衡环与转子相连。
内挠性轴线垂直于驱动轴线,外挠性轴线垂直于内挠性轴线,并与驱动轴交于一点。正常工作时,驱动电机高速旋转,通过内挠性轴带动平衡环转动,平衡环再通过外挠性轴带动陀螺转子旋转。
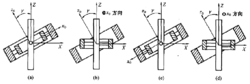
在无干扰的情况下,挠性陀螺仪的自转轴与驱动轴在同一条轴线上;在受到干扰力矩或壳体转动时,自转轴和驱动轴便不在同一轴线上。
驱动轴与自转轴(平衡环)之间的运动关系如下图所示。其中XYZ为与壳体固连的坐标系,Z轴为驱动方向; 为与转子固连的坐标系,
为与转子固连的坐标系, 为自转轴方向。
为自转轴方向。
动力调谐挠性陀螺仪的运动方程为:
 其中
其中 为转子相对x轴的转角,
为转子相对x轴的转角, 为转子相对y轴的转角,
为转子相对y轴的转角, 为有效的转子径向转动惯量,J为有效的转子轴向转动惯量,
为有效的转子径向转动惯量,J为有效的转子轴向转动惯量, 为转子相对旋转轴角速度,
为转子相对旋转轴角速度, 为挠性支承弹性系数,
为挠性支承弹性系数, 为支承正交弹性系数,
为支承正交弹性系数, 为相对x轴作用在转子上的力矩,
为相对x轴作用在转子上的力矩, 为相对y轴作用在转子上的力矩。
为相对y轴作用在转子上的力矩。
当对挠性陀螺仪实现调谐时,约等于0,且剩余的正交弹性系数项的影响和f项的影响均可忽略,由此得到自由转子陀螺仪方程(其中 ):
):

进一步可得到进动方程为:

挠性陀螺仪的特点(1)体积小、结构简单、重量轻、成本较低
(2)可靠性高
(3)工作准备时间短
(4)消除了摩擦等干扰因素的影响
(5)能够承受的冲击和加速度有限,稳定性不够,寿命有限1
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国