

简介
天文制导以不可毁灭的自然天体做为导航信标,是一种完全独立自主的导航方式。并且天文制导系统与地形匹配制导系统、全球导航星定位系统(GPS)并称为提高弹道导弹命中精度的三大系统。3
除导弹领域外,天文制导系统在行星际导航和深宇宙导航中也有着十分重要的意义。阿波罗登月飞船就成功的运用了天文制导系统来进行中途修正,使飞船以很高的精度登上月球和返回。而未来的深宇宙航行中,天文制导系统将发挥主导的作用。3
天文制导系统天文制导系统采用的敏感元件有星光跟踪器和空间六分仪。这两个仪器的概念是不完全一致的。星光跟踪器放在导弹的惯性稳定平台上,根据计算机的指令自动跟踪星体,用以修正弹道导弹的发射位置和发射方位以及飞行中惯性平台的漂移。空间六分仪则不一定放在惯性平台上,因为一旦飞行器进入星际空间以后,它将不再受到突然的、毫无规律性的大幅度扰动影响,例如强烈的阵风等,尤其在作自由飞行时它本身就是一个良好的稳定平台。另外空间六分仪可以根据计算机的指令自动跟踪星体,也可以由宇航员操作来跟踪星体。空间六分仪可以独立于其他的制导设备而确定航天飞行器的速度和位置。但是星光跟踪器和空间六分仪也有相似之处,它们的测角原理和结构几乎是一样的。3
基本原理计算空间位置需要的光学观测数据,是位置已知的几个近天体相对已知惯性参考系的瞄准线方向。惯性参考线可由任意两个不共线的恒星线(指瞄准线)或任意一组三根不共面的恒星线或惯性平台的坐标轴确定。3
显然,空间定位只有通过观测近天体才能做到,因为这种测量才有位置的几何意义。对确定位置所需角度数据的测量,实质上是近天体对恒星背景瞄准线的视差测量。举例来说,一颗恒星(惯性系)和一颗行星中心(近天体)之间的夹角随空间飞行器位置的改变而改变。另一方面,很显然两颗恒星线之间的夹角不发生测量变化。因此,角度的变化能够表示位置的变化。3
 在行星际航行时必须对恒星线视差进行修正。但是,修正量比要测量的近天体视差小得多。因此,对于没有必要是很精确的恒星线可以进行简单的修正,并且这是不成问题的。3
在行星际航行时必须对恒星线视差进行修正。但是,修正量比要测量的近天体视差小得多。因此,对于没有必要是很精确的恒星线可以进行简单的修正,并且这是不成问题的。3
讨论光学定位所涉及到的某些几何学基本原理是有指导意义的。考虑用一个简单的六分仪作为侧量两个点光源(它们之中的一个是近光源)之间夹角的测量仪。为了简化,假定定位所需的各种观测是同时进行的。3
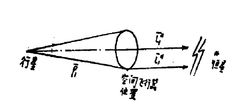
 如果用六分仪来测量某一颗恒星和某一颗行星光盘中心之间的夹角,那么空间飞行器的位置就由空间的圆锥面来确定(如图1)。这个圆锥面是这样的,在空间飞行器位置上指向恒星和指向行星光盘中心的射线所形成的张角是一个常值。也就是说,根据这一组观测数据确定的空间飞行器位置处在圆锥上。对第二颗恒星和同一颗行星体进行第二次测量,便得到顶点也和行星的位置相重合的第二个圆锥。这两个圆锥相交便确定两条线(如图2)。空间飞行器就位于这两条线的一条上。模糊度可以选择第三颗恒星来消除。但是,一般来说空间飞行器位置的标准值是事先知道的。因此,空间飞行器所在的实际的线通常不需要第三颗恒星就可以确定。3
如果用六分仪来测量某一颗恒星和某一颗行星光盘中心之间的夹角,那么空间飞行器的位置就由空间的圆锥面来确定(如图1)。这个圆锥面是这样的,在空间飞行器位置上指向恒星和指向行星光盘中心的射线所形成的张角是一个常值。也就是说,根据这一组观测数据确定的空间飞行器位置处在圆锥上。对第二颗恒星和同一颗行星体进行第二次测量,便得到顶点也和行星的位置相重合的第二个圆锥。这两个圆锥相交便确定两条线(如图2)。空间飞行器就位于这两条线的一条上。模糊度可以选择第三颗恒星来消除。但是,一般来说空间飞行器位置的标准值是事先知道的。因此,空间飞行器所在的实际的线通常不需要第三颗恒星就可以确定。3
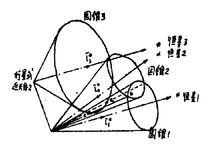 为了决定空间飞行器在线上的位置,需要选择到第一颗近天休的距离向量已知的第二颗近天体。为对位置进行“三角测量”,需要选择第二颗近天体。顶点在第二颗近天体上的第三个圆锥与前两个圆锥相交便确定出两个点,即图3所示的a和c,它们之中的一个点是模糊点。(这个模糊点也可以用上面提到过的方法解决)。在三个圆锥的交点上选出的点表示相对于任一颗近天体的位置。3
为了决定空间飞行器在线上的位置,需要选择到第一颗近天休的距离向量已知的第二颗近天体。为对位置进行“三角测量”,需要选择第二颗近天体。顶点在第二颗近天体上的第三个圆锥与前两个圆锥相交便确定出两个点,即图3所示的a和c,它们之中的一个点是模糊点。(这个模糊点也可以用上面提到过的方法解决)。在三个圆锥的交点上选出的点表示相对于任一颗近天体的位置。3
计算位置需要有一个恒星表和至少两颗近天体(行星)的星历信息。我们会发现各种定位技术(不管这些技术是包括两颗行星,还是包括视距技术或陆标跟踪)都要求这些基本的信息。恒星作为对天文坐标定位的参考而引人的,所含的基木测量数据是三个或更多的角度,用这些角度就可确定出从空间飞行器的位置上观测到的近天体同选定的恒星之间的夹角。3
特点与优势在电子导航系统设备越来越发达的今天,天文制导导航技术不但没有退出历史舞台,反而以其独特的优势备受世人瞩目。随着电子天文导航设备的出现和成熟,天文定位与定向技术开始走出航海领域的限制,逐渐向更广阔的领域发展。在导弹制导领域,天文技术应用有以下优势1:
导航精度高。毋庸置疑,天文导航短时间内的导航精度低于惯性导航,但误差不随时间积累,导航精度主要取决于天体敏感器的精度。目前来看,在稳定的状态下,主流天体敏感器均可达到1.8 km 的测角定位精度;1
抗干扰能力强。除惯性导航外,几乎任何一种电子制导方式都可进行有效的干扰。而天体辐射覆盖了整个电磁波段,在世界各地均可接收,具有极强的抗干扰能力;1
成本低廉。相对昂贵的惯导设备而言,天文制导具有显著的经济优势;1
质量轻。当前,主流恒星敏感器质量为 2 ~ 3 kg,太阳敏感器镜头甚至不足 1 kg,远远低于惯性导航系统的质量。1
可以看出,天文制导技术具有目前主流技术所不具有的显著优势,这使得以天文导航技术为主体的制导技术具有广阔的应用前景。1

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国