

陀螺仪的研制历史
早在 18 世纪,欧拉、拉格朗日等许多学者都对高速旋转刚体作了详细的研究,并指出这种旋转的刚体具有进动性和定轴性。尤为突出的是,俄国数学家和物理学家欧拉发表的《刚体绕定点运动理论》这一名著,导出了刚体绕定点转动的动力学方程,为陀螺仪理论奠定了基础。 1852 年,法国物理学家 Foucault 利用高速旋转刚体的方向稳定性,设计并制成了一种装置,将其取名为“陀螺仪”。这是探索陀螺仪走向应用的开端。 19 世纪海难事故的频繁发生,促进了陀螺仪在航海中的应用。1909 年美国制成了陀螺罗经用于舰船的导航。1932 年德国科学家舒勒提出了舒勒原理,使陀螺罗经的精度得到很大提高。50 年代以后,出现了电控罗经,并在此基础上发展成
为平台罗经。 陀螺仪在航空上的应用比航海稍晚些。从 20 世纪 20 年代到 30 年代,在飞机上相继使用了陀螺转弯仪、陀螺地平仪和方向仪作为指示仪表。30 年代中期开始使用陀螺仪表作为敏感元件。从 40 年代到 50 代,航空陀螺仪表向组合式发展,相继出现了陀螺磁罗盘、全姿态组合陀螺仪和陀螺稳定平台。 从 20 世纪 50 年代末至 60 年代,以液浮陀螺仪构成的平台使惯导系统得到长足发展,并大量装备各种飞机、舰船、导弹和航天飞行器。20 世纪 70 年代以来,陀螺电机采用以动压气浮轴承、浮子采用高比重液体悬浮、输出轴采用磁悬浮定位的“三浮”陀螺仪得到长足发展。国内自 20 世纪 60 年代初开始液浮陀螺仪的研制,并于 80 年代初使用。目前,我国研制的陀螺仪,其随机漂移率已达 0.001°/h。1
陀螺仪原理高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于垂直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止时可加以应用。
陀螺仪基本上就是运用物体高速旋转时,角动量很大,旋转轴会一直稳定指向一个方向的性质,所制造出来的定向仪器。不过它必需转得够快,或者惯量够大(也可以说是角动量要够大)。不然,只要一个很小的力矩,就会严重影响到它的稳定性。
用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。轴的底部被托住静止但是能够各个方向旋转。当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如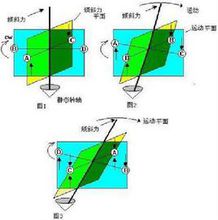 其中的子图1。因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。CD两个质点的情况也是一样的。子图2中质点A当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。AC质点的组合将导致轴在子图2所示的运动平面内运动。一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。C质点的向下运动受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。
其中的子图1。因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。CD两个质点的情况也是一样的。子图2中质点A当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。AC质点的组合将导致轴在子图2所示的运动平面内运动。一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。C质点的向下运动受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。
陀螺电机是陀螺仪核心部件,其性能决定了陀螺仪的精度。电机转动功能是衡量电机的主要指标,陀螺仪电机转速自检频率即为判断速率陀螺仪的重要技术指标。其在生产过程中、发射场和航天器飞行过程中,都要对此项指标进行测试,以判定电机转速的稳定性和确认速率陀螺仪功能的正常性。
未来发展随着我国导弹、航空、航海以及宇航等技术的发展,陀螺仪—这个各种运动体上的核心姿态基准敏感元件也从无到有的发展起来。
单自由度液浮积分陀螺仪在美、苏、英、法等技术先进国家均作为主要的尖端制导和导航方面的控制仪表被应用于军事和商业等各类控制系统中,如美国的阿波罗登月飞行,人马星座,北极星、三叉戟导弹战略核潜艇;航天系统;航空民用客机波音707、747;英法的A一300C等先进产品上。
我国单自由度液浮积分陀螺仪在航海领域中得到比较全面的发展,初步完成了第一代单自由度液浮积分陀螺仪的研究,设计、试验和产品的使用等工作,随机漂移的精度指标(一a)达到了 ~
~ ,初步达到了惯性级指标的要求。其第一代单自由度积分陀螺仪是指陀螺仪的基本用材为LY17硬铝合金,支承系统为氟氯油和球形小轴红宝石眼定中心,陀螺马达为主轴空气动压气体支承的磁滞同步电机为基本组成的方案系统。这种方案基本适合了我国过去和当前的设计水平以及工艺、材料的发展水平:今后将开始向第二代单自由度液浮积分陀螺仪的方向发展,它的初步模式是陀螺仪的基本甩材为镀(B。)材;支承系统为氟澳油和磁悬浮定中心;陀螺马达将采用动量矩H调制等技术。按我国当前的技术发展水平拿出可供产品使用的元件,大约需要若干年的时间。因此有必要在研究第二代陀螺仪的同时,将第一代陀螺仪使之产品化和标准化。2
,初步达到了惯性级指标的要求。其第一代单自由度积分陀螺仪是指陀螺仪的基本用材为LY17硬铝合金,支承系统为氟氯油和球形小轴红宝石眼定中心,陀螺马达为主轴空气动压气体支承的磁滞同步电机为基本组成的方案系统。这种方案基本适合了我国过去和当前的设计水平以及工艺、材料的发展水平:今后将开始向第二代单自由度液浮积分陀螺仪的方向发展,它的初步模式是陀螺仪的基本甩材为镀(B。)材;支承系统为氟澳油和磁悬浮定中心;陀螺马达将采用动量矩H调制等技术。按我国当前的技术发展水平拿出可供产品使用的元件,大约需要若干年的时间。因此有必要在研究第二代陀螺仪的同时,将第一代陀螺仪使之产品化和标准化。2
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国