

基本介绍
假定刚体固结参考系 在惯性参考系
在惯性参考系 中有旋转运动,瞬时旋转角速度为
中有旋转运动,瞬时旋转角速度为 ,三个分量记为
,三个分量记为 。
。
 本体赤道面
本体赤道面 与平均赤道面
与平均赤道面 有一个交线,从原点
有一个交线,从原点 沿上述交线的一方引伸出一个射线,称之为节线 ,节线与
沿上述交线的一方引伸出一个射线,称之为节线 ,节线与 之间的夹角称为进动角,用
之间的夹角称为进动角,用 表示;瞬时轴
表示;瞬时轴 与 之间的夹角称为自转角,用
与 之间的夹角称为自转角,用 表示;
表示; 与
与 之间的夹角称为章动角,用
之间的夹角称为章动角,用 表示。自转角 、进动角 和章动角 通称Euler角,是由Euler引进的。三个Euler角可以完全描述任意一个刚体的旋转运动,原因在于:一个点由三个独立坐标描述;一个刚体通常需要不在同一条直线上的三个点(共9个坐标)来描述;将其中的一个点选为原点,则只需要2个点即6个坐标来描述;但3个点之间存在3个距离方程,因而独立的坐标数只有3个;3个Euler角正好构成一组独立坐标。在事先不知道刚体的旋转运动规律的前提下,要想确定这种旋转运动,则需要求解Euler运动学方程和Euler动力学方程。2
表示。自转角 、进动角 和章动角 通称Euler角,是由Euler引进的。三个Euler角可以完全描述任意一个刚体的旋转运动,原因在于:一个点由三个独立坐标描述;一个刚体通常需要不在同一条直线上的三个点(共9个坐标)来描述;将其中的一个点选为原点,则只需要2个点即6个坐标来描述;但3个点之间存在3个距离方程,因而独立的坐标数只有3个;3个Euler角正好构成一组独立坐标。在事先不知道刚体的旋转运动规律的前提下,要想确定这种旋转运动,则需要求解Euler运动学方程和Euler动力学方程。2
方程形式根据三个Euler角的定义不难写出如下关系:
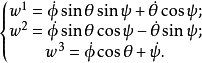
其中 表示绕地固质心坐标系
表示绕地固质心坐标系 轴的旋转角速度。上式便是著名的Euler运动学方程,即欧拉****运动学方程。
轴的旋转角速度。上式便是著名的Euler运动学方程,即欧拉****运动学方程。
准惯性系中的表达形式将旋转角速度 在准惯性系 中表示出来:
在准惯性系 中表示出来:
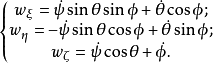 其中
其中 表示绕地心准惯性坐标系
表示绕地心准惯性坐标系 轴的旋转角速度(
轴的旋转角速度( )。2
)。2
相关概念欧拉角
刚体定点运动的自由度为3,如何选择3个变量,使它们既能简单、明确、单值地确定刚体位置,又能独立变化,这对简化定点运动的描述是非常重要的,刚体力学的奠基者欧拉(Leonhard Euler,1707一1783)成功地、巧妙地解决了这个问题,他选择3个角度,即著名的欧拉角(Euler angles)作为描述刚体定点运动的变量,具体选择方法如下:以固定点为原点建立静正坐标系 ,再以固定点为原点建立与刚体固连的动坐标系 如图1。3
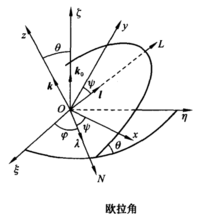
确定刚体位置等价于确定动坐标的位置,他用两个角度确定z轴的位置,一个是z轴对 轴的倾角
轴的倾角 角,另一个是用来确定z轴的方位,它是 面与平均赤道面 面的交线ON与
角,另一个是用来确定z轴的方位,它是 面与平均赤道面 面的交线ON与 轴的夹角,交线ON称为节线;这两个角确定后,z轴的位置就确定了,但动坐标系还可以绕z轴转动,若动坐标的x轴与节线的夹角
轴的夹角,交线ON称为节线;这两个角确定后,z轴的位置就确定了,但动坐标系还可以绕z轴转动,若动坐标的x轴与节线的夹角 确定了,则动坐标的位置完全确定,这样选取的3个角 ,
确定了,则动坐标的位置完全确定,这样选取的3个角 , , 称为欧拉角。
, 称为欧拉角。
它们的量度方向如图所示,它们的变化范围分别为: 。
。
这3个角可以独立变化,即这3个变量是独立的,从运动学上,它们之间不存在依赖关系(即函数关系),最能说明其独立性的事实是:当任何一个角自由改变时,其他两个角可以保持不变,如以下三种情况是可能的。
1. 仅 角改变,保持 , 不变。这种运动相应于z轴与 轴间夹角不变,z轴在静止空间中沿圆锥面运动,同时 角也保持不变,这种运动称为进动(precession),相应的角速度称为进动角速度,它的大小和方向为 ,
, 为 轴的单位矢量。
为 轴的单位矢量。
2. 仅 角改变,保持 , 角不变。刚体的这种运动称为章动(nutation),相应的角速度为章动角速度,它的大小和方向为 ,
, 为沿节线的单位矢量。
为沿节线的单位矢量。
3. 仅 角改变,保持 , 角不变。刚体的这种运动称为自转(rotation),相应的角速度为 ,称为自转角速度,k为z轴的单位矢量。
,称为自转角速度,k为z轴的单位矢量。
当3个角同时变化,三种运动同时存在时,刚体的角速度为3个分角速度的合成。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国