

2020年4月24日是第五个“中国航天日”,今年航天日的主题是“弘扬航天精神,拥抱星辰大海”。短短一句话,彰显了中国航天人不忘初心的坚持和进军深空的热望。
在地球上,向星辰大海前进的第一步便是火箭发射,如果不能挣脱地心引力的束缚,一切都将无从谈起。
以目前我国比较先进的重型运载火箭——长征五号B为例,它的全长达到53.7米,起飞质量可达849吨。想要将这样的庞然大物送上太空,自然少不了推力强大的火箭发动机。
那么,不知道大家有没有想过,火箭发动机的推力那么猛,火箭在飞行中如何保证自己处于正确的姿态而不发生“跑偏”?如果姿态发生异常时火箭又是如何进行调整的呢?这篇文章就带大家了解一下火箭姿态控制和调整系统是如何“驯服”火箭的。
火箭内心独白:我在哪,我在做什么?
对于火箭的姿态控制而言,最首要的任务在于先明白自己的姿态处于怎样的情况。试想手握方向盘的你想要通过车水马龙的街道时,是否想起了科目考试那句话:先观察路口情况?
对于火箭同样如此。而火箭“观察”自己角度(朝向)和速度的途径,是陀螺仪和加速度计。陀螺仪的结构及运作的大致原理如下面的动图所示。
图1:航空陀螺仪的原理 图源:公有领域gif
图2:偏轴陀螺仪 图源:公有领域 gif
陀螺仪的原理比较复杂,不过我们可以将、 它类比成我们平常玩的陀螺,只是这个陀螺的转速相当高。我们在玩陀螺的时候都能看到,陀螺转的越快,它越容易维持转动姿态。
而火箭用到的就是一种高速旋转的陀螺仪。陀螺仪有一个性质,它在高速旋转的时候其转动所围绕的轴不会发生变化。根据这一特性,我们就可以得到火箭飞行过程中的角度,也即朝向。
下图中展示的是航空领域早期的陀螺仪,它就是通过上述性质来测量当前航向角度的。一般的火箭会安装三个速率陀螺,由于载人火箭具有高可靠性要求,可能会配备更多的陀螺仪。如长征2F载人火箭安装了六个速率陀螺,分别测量火箭的俯仰角速度、偏航角速度和滚动角速度。
图3 :早期的陀螺仪,图片来源:wikipedia
除传统的机械陀螺仪以外,还有激光陀螺仪、光纤陀螺仪、量子陀螺仪和微机电MEMS陀螺仪等。激光陀螺仪和光纤陀螺仪是目前在航空航天领域应用更多的陀螺仪,它的精度更高、反应更快、可靠性也更强。此外,量子陀螺仪也有极高的精度,但结构也更复杂。
生活中较为常见的是微机电MEMS陀螺仪,一般更广泛地应用于消费类电子产品中,如手机、VR设备、移动游戏机及相机等。
不过,知道朝向还不够,还要时刻检查“油门”,也就是火箭的加速度。经典加速度计的原理如图所示,其中蓝色的壳体安装在火箭上,感受轴线与想要测得的火箭加速度方向平行。在火箭有加速度时,两个弹簧的力将有所区别。此时中间的滑块会有位置上的变化。位置变化带动上方的接触点变化,从而影响电压输出。加速度大,输出电压的部分所分得的电压就越小,就可以根据输出的值计算火箭此时的加速度。

图4: 加速度计结构示意图,作者自制
当然,这只是一个加速度计原理的简单示例,现在还有很多其他原理的加速度计,如电容式(通过测量电容的变化来检测加速度的变化)、电感式、应变式、压阻式(通过使用压敏元件将受到的力的微小变化转变为电信号)和压电式等等。这些都是各种运载工具了解自己速度的途径和方法。
假如火箭“跑偏”,谁来下令纠正?
假设火箭现在“看”到自己飞行的方向和速度存在种种问题,及时调整就是必须的了。不过,具体做什么样的调整还需要一个“大脑”来统合处理“看到”的各种问题。
调整火箭姿态涉及到自动控制的一些理论,具体情况当然非常复杂,我们只能粗略的介绍一些其中的要点。火箭首先通过陀螺仪得到姿态信息,在经过一系列处理将姿态信息转化成可用的信号。这个处理过程包括对测量信息的运算、转换和放大等。之后,控制系统将这些经过转化后的信息编制成可用于操作火箭的命令,进而实现对火箭的操控。
简单理解,通过陀螺仪和加速度计,可以知道火箭在天上的角度和速度,角度有没有跑偏?是快了还是慢了?当得到相关信息后,将这些值与预先设计好的值进行对比(还是类比开车,我们要尽量让车保持在道路的中央)。对比发现一切正常,就可以继续飞行过程;对比一旦发现角度与设定值偏差太大(好比汽车要撞到栅栏了),或者速度过高或过低了(低于最低限速或高于最高限速了),那就需要进行一些调整。
此时箭载计算机将会经过运算给出指令,通过特定的机构来实现调整。那么这些特定的机构,又是一些怎样对火箭姿态进行调整的呢?
如何把“跑偏”的火箭拉回正确的方向?
现在我们假设火箭已经知道自己哪里出了问题,也得到了需要调整的指令。此时,火箭的伺服机构和操纵机构就会充当“手”和“脚”的角色。以传统喷管可摆动的火箭为例,伺服机构和操纵机构的结构如图。左图显示的是放大后的操纵机构,这里以柔性摆动喷管为例。右图所示的为伺服机构和操纵机构的相对安装关系,右图蓝色框中的为操纵机构,红色框为操纵机构。
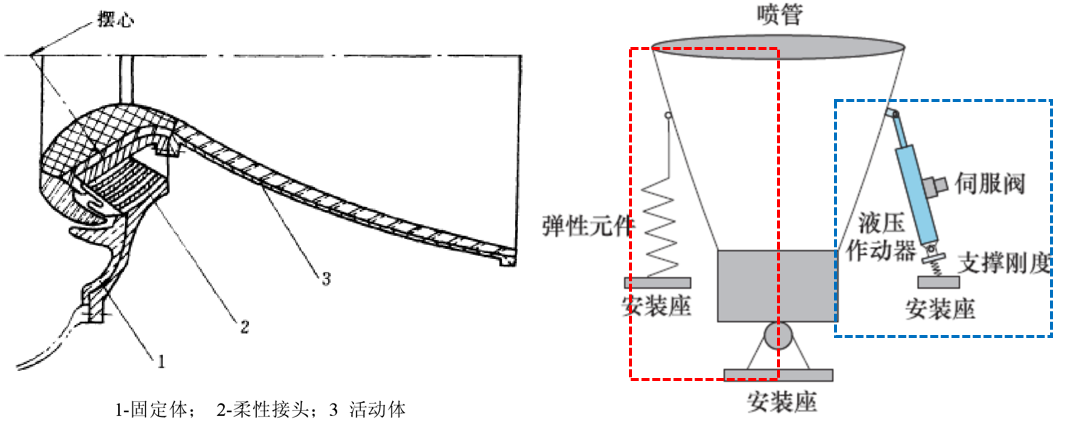
图5: 伺服机构和操纵机构 图源:小型固体火箭发动机摆动喷管设计技术研究
火箭伺服机构一般由伺服阀、作动器、反馈电位器和能源等组成,为流体、机械、电磁、电子一体化产品。以长征2F载人火箭为例,为提高可靠性,它采用了三冗余度伺服机构。这意味着同时有三台计算器对火箭的姿态、角度等进行控制。三者之间结果互相参考,当其中一个出现故障时,另外两个还能正常独立运作。
可摆动喷管的姿态调节原理为矢量推进控制,此外还有使用燃气舵的气动控制。如图所示,二者的主要区别在于,气动控制是时刻都有的,只要火箭还处于大气层环境内。而矢量控制是主动的,需要主动操作才有。同时气动控制无需推力,但矢量推进控制主要依靠发动机产生的推力。目前气动控制多见于导弹等武器,而对运载火箭而言,这两种方式都会使用到。同时,对于大推力火箭,起主要作用的还是矢量推进控制。
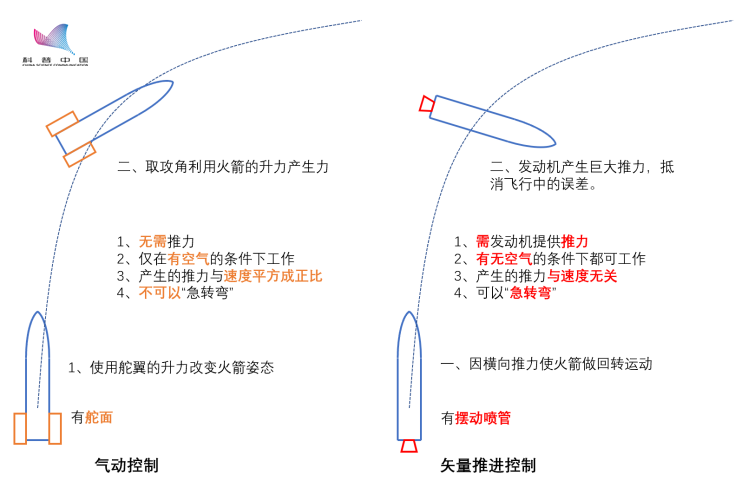
图6:气动控制和矢量推进控制,作者自制
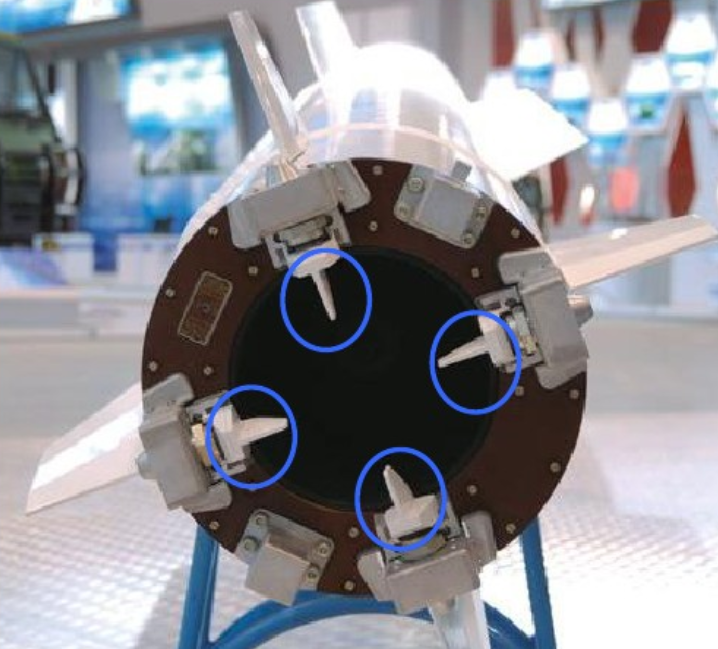
图7: 某型号导弹模型,其中蓝色圈出的部分为燃气舵,作者供图
正是有了伺服机构和操纵机构的调整,火箭才能航向坚定不“跑偏”。
50年前,在那个物资匮乏的时代,我们筚路蓝缕,集中全国的力量发展航天事业,将东方红一号送上太空,在太空中有了一席之地。
50年后的今天,东方红一号已经成为航天史上的一座丰碑,中国航天事业也蓬勃发展,在和平探索和利用太空的道路上砥砺前行。火箭,为我国航天事业的腾飞插上翅膀;而火箭的姿态控制系统为其成功发射提供了强有力的后盾,为航天梦保驾护航。
参考文献
1.王春利编.航空航天推进系统[M].北京:北京理工大学出版社.2004
2.王玉新著.喷气发动机轴对称推力矢量喷管[M].北京:国防工业出版社.2006.
3.方昌德主编.航空发动机的发展历程[M].北京:航空工业出版社.2007.
4.王晓东. 导弹和运载火箭姿态稳定与控制技术发展的回顾和展望[J]. 导弹与航天运载技术, 2003(3):25-30.
5.吴燕生, 何麟书. Attitude control technology of new-generation launch Vehicles [J]. 北京航空航天大学学报, 2009, 035(011):1294-1297.
6.张卫东, 刘玉玺, 刘汉兵,等. 运载火箭姿态控制技术的发展趋势和展望[J]. 航天控制, 2017(03):86-90.
7.Armenise, Mario N, Ciminelli, Caterina, Dell'Olio, Francesco,等. Advances in gyroscope technologies[J]. 2010.
8.Herve C. Lefevre, Philippe Martin, Thierry P. Gaiffe,等. Latest advances in fiber optic gyroscope technology at Photonetics[J]. Proceedings of Spie the International Society for Optical Engineering, 1994, 2292:156-165.
9.国家国防科技工业局,http://clep.org.cn/n6909/n6990/c35671/content.html
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国