

根据新华社消息,2019年1月3日10时26分,嫦娥四号探测器自主着陆在月球背面南极-艾特肯盆地内的冯?卡门撞击坑内,实现人类探测器首次在月球背面软着陆。
阿波罗16号拍摄的月球背面(图片来源:维基)

冯-卡门撞击坑在月球上的位置(图片来源:NASA)
在发射四天后的12月12日,嫦娥四号开始在100公里高度的环月轨道上运行,并在环月轨道上与“鹊桥”中继星进行了4次中继链路测试和多项在轨测试,为实施月球背面软着陆奠定了基础。12月30日,嫦娥四号探测器成功在环月轨道实施变轨控制,顺利进入着陆轨道,择机降落。1月3日,嫦娥四号探测器成功降落月球背面,这是人类首次登陆月球背面,也是中国探月工程的一个新的里程碑。

鹊桥中继星(图片来源:中国空间技术研究院)
嫦娥一号到四号,探月工程逐步实现
**本世纪初开始,中国探月工程基本确定了在2020年左右实施绕、落、回的三步走战略。**2007年,嫦娥一号成功实施环月探测,成功实现了我国探月工程一期绕月的目标。2010年,嫦娥二号不负众望,在完成环月先导探测之后,又进一步扩展了对L2点、小行星等多目标探测,圆满完成了其作为探月二期工程先导星的任务。2013年,嫦娥三号成功在月球虹湾软着陆,释放玉兔号月球车。至此,探测工程第二步基本完成。

嫦娥3号探测器(图片来源:中国空间技术研究院)
嫦娥四号作为嫦娥三号的备份星,其在设计、结构等方面基本是相同的。鉴于嫦娥三号任务圆满完成,那么嫦娥四号自然就被赋予了一些新的探索方向,登陆月球背面的任务由此诞生。2016年1月,嫦娥四号通过探月工程重大专项小组审议,确定发射时间在2018年,实施人类无人探测器第一次在月球背面软着陆,意义重大。
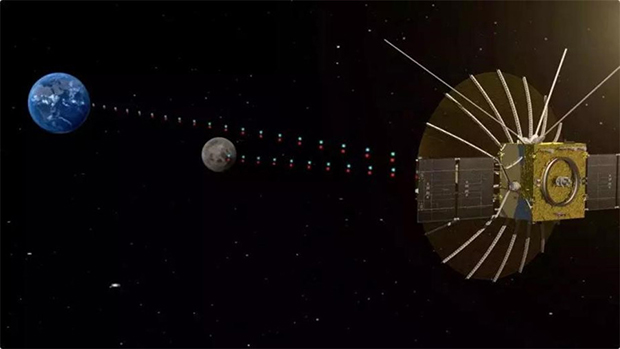
地月中继通信示意图(图片来源:中国空间技术研究院)
为了满足嫦娥四号软着陆月球背面的需求,鹊桥号中继星研发拉开序幕,其研制时间只有两年内,设计寿命为3年,携带了4.2米口径高增益抛物面天线,可实施地月系内任意目标指向与跟踪控制,为嫦娥四号着陆器、月面巡视器、地面控制中心之间建立联系提供坚实的技术保障。鹊桥号的研发真正体现了中国航天在探月方向上的技术积累,其诞生是为了嫦娥四号任务而存在。研制周期短、重量也小,只有400多公斤,星载燃料也少,设计轨道需要12次轨道控制修正,3次捕获控制修正,才能进入环月L2点。在轨飞行期间任何一脚“刹车”不及时,那么鹊桥号很可能错过预定轨道,影响到嫦娥四号任务的正常推进。更重要的是,鹊桥号还携带了低频射电探测仪,在完成嫦娥四号中继任务的同时,还可以对早期宇宙进行探索和研究,整星性价比就体现出来了。
半个世纪,50多个着陆器奔向月球
在嫦娥四号之前,世界上只有中美俄(苏)完成了在月球表面的软着陆。最近一次就是嫦娥三号成功在月球虹湾着陆,再上一次就要追溯到1976年苏联月球24号了。月球24号探测器具有返回能力,苏联科学家也获得了月表下2米大约170克月壤样本。在1950年代末至1970年代,美苏之间爆发了人类史上第一轮大规模无人探月、载人登月竞赛,一共发射了100个左右的涉月航天器,其中包括美国阿波罗计划6次载人登月和苏联2次在月面释放月球车。
早期登月探测器采用的是最原始的硬着陆方式登月,比如于1958年发射的苏联88所研发的月球1A探测器,按计划该探测器要撞击月球表面,以硬着陆的方式将人造物体第一次送到月球表面。苏联第6次尝试才获得成功,月球2号也成为第一个以撞月硬着陆方式抵达地外天体的人造物体。美国研发的徘徊者4号也在1962年成功硬着陆,史上第二。最早期的硬着陆方式不顾星载设备的安全,只求谁先把人造物体“扔”到月球上,但美苏的相关试验也表明,硬着陆如果控制在一定速度范围,可以确保航天器(弹头)结构完好。只不过美苏很快又开始竞争软着陆以及载人登月,硬着陆也就开始废弃的。在1970年代,美国利用潘兴系列弹道导弹弹头进行的高速侵彻深度试验表明,在500至600米每秒的接地速度撞击泥沙地质,弹头可以保证完好无损,这个成果也可用于对其他太阳系天体的探测。
1966年,苏联月球9号探测器成功在月面实施软着陆,月表工作8小时多,美国的勘测者1号也在同年完成月面软着陆,开启了月面软着陆的探测时代。到目前为止,苏联有7次软着陆月面成功,美国算上阿波罗计划6次载人登月,一共11次,勘测者4号有可能在软着陆前解体,因此不计入,然后就是中国嫦娥3号。前后19个无人/有人着陆器在月面成功降落,如果算上硬着陆或者撞击月面的探测器,那么数量要超过50个。这些航天器中,嫦娥四号是最特别的一个,不仅要在月球背面软着陆,还要释放一台月球车,这样的成就当然是半个世纪50多个涉月任务软硬着陆航天器中最突出的一个,开启了月背探索的新篇章。
四段飞行后,降于月球南极冯卡门坑
作为备份星的嫦娥四号,其软着陆设计与嫦娥三号基本相同。从轨道设计上看,两者也基本类似,嫦娥四号第一飞行段先由CZ-3B火箭送入近地点200公里、远地点42万公里的地月转移轨道;第二飞行段实施近月点制动,被月球引力捕获,进入100公里高度环月轨道;第三段实施轨道机动,进入近点月15公里,远月点100公里的椭圆轨道;第四段为近月点实施动力下降:主减速-快速调整-接近-悬停-避障-缓速下降。
嫦娥四号这次软着陆区域位于月球背面的南极艾肯盆地内的冯-卡门撞击坑内,该撞击坑直径大约180公里,差不多是上海到杭州的距离。而冯-卡门坑所在艾肯盆地则是一个非常古老的大型盆地,直径达到2600公里,具有的科学意义显然是非常重大的。
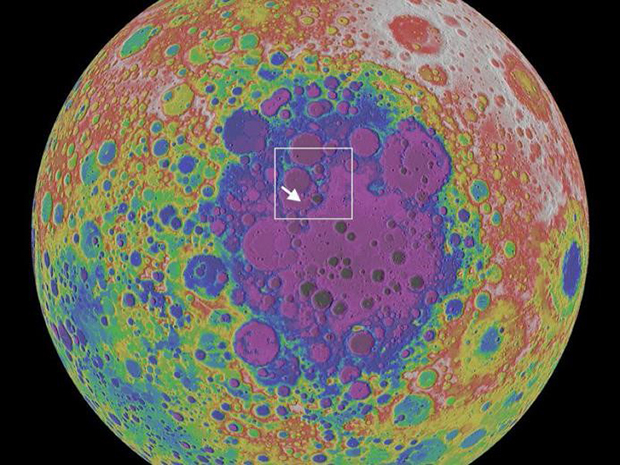
从月球极区看冯卡门坑(图片来源:NASA)
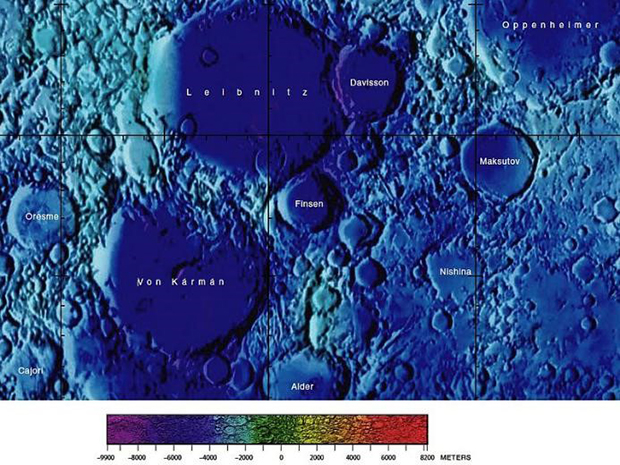
冯-卡门撞击坑图像(图片来源:维基)
冯-卡门撞击坑的特点在于:第一,地势比较平坦,适合探测器着落,所谓的坑大峰小;第二,年龄古老,距今40亿年以上,后期可挖掘出月球雨海纪玄武岩样本;第三,其冯-卡门坑在形成之前已经存在一个更大的撞击坑,通过撞击坑形成模型我们可以得知,冯-卡门坑表层或者浅表月壤中很可能有早期撞击暴露出的深层月幔物质。根据日本月神号探测器的数据,艾肯盆地内的月壳厚度较薄。同时,克莱门汀探测器的数据也显示,冯-卡门坑底有复杂的岩浆活动,多个证据显示雨海纪时冯-卡门坑存在重复撞击、月壳多次熔融,形成了今天我们看到的玄武岩层。综合多个因素,登陆冯-卡门坑的科学意义重大,未来获得的发现成果也值得期待。
嫦娥3号接近段制动动画(图片来源:CCTV)
从接近段开始,嫦娥4号上的光学成像仪介入,获取着陆区光学图像,由于嫦娥四号降落点选择在月球南极,因此太阳光照是一个控制条件,根据这个条件我们也可以推测出嫦娥四号的落月时间。只有降落点光照条件良好,着陆区光学图像越清晰越好,这样着陆器可识别月面大型障碍物。

嫦娥3号着陆器(图片来源:中国空间技术研究院)
在悬停段时,嫦娥四号着陆器高度大约距离月面100米左右,通过激光三维成像仪建立着陆区三维高程数据,此时的横向、纵向速度都为零,姿态正上,缩小着陆区范围。接着,精细避障飞行开始,嫦娥四号着陆器高度开始进一步下降,从距离月面100米降低到30米左右,水平速度零,垂直速度值控制在每秒1.5米。从距离月面30米高度下降到月面,在关机传感器发出信号时,着陆器垂直速度应低于每秒3.8米,水平速度低于每秒1米,月面倾角小于8度,基本上可确保安全着陆。
嫦娥四号登陆之后会进行仪器自检,后续将开展多个科学的任务,主要方向有三个:第一,月基低频射电天文观测;第二,冯-卡门坑巡视及浅层结构探测、下方矿物组分探测;第三,月背环境研究。嫦娥四号,有助于建立月背矿物、月面环境的早期研究框架,为今后的深入开发月球打下基础。
三步走战略后,将开启载人登月任务
在嫦娥四号完成任务后,嫦娥五号将实现我国探月工程三步走战略中的“回”。这意味着嫦娥5号返回舱就要从月球表面起飞,以接近第二宇宙速度返回地球。上一次月壤返回要追溯到1976年的苏联月球24号探测器,也意味着时隔40多年后,人类再次从月球上采回样本。
探月工程三步走完成之后,下一步就要开启载人登月的任务。随着NASA要重返月球,俄罗斯、欧洲跃跃欲试,私人航天企业也杀出重围。预计在2030年代,人类将再次开启新一轮载人登月窗口。
(本文中标明来源的图片均已获得授权)
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国