

调频连续波雷达,是指发射频率受特定信号调制的连续波雷达,它是一种发射线性调频连续波的气象雷达。调频连续波雷达通过比较任意时刻回波信号频率与此时刻发射信号的频率的之差方法来得到目标的距离信息,距离正比于两者的频率差。目标的径向速度和距离可由测量的二者频率差处理后得到。与其他测距测速雷达相比,调频连续波雷达的结构更简单。FMCW雷达的技术经验较丰富,所需的发射功率峰值较低、容易调制、成本低、信号处理简单,因而是汽车雷达中常用的雷达体制。
简介连续波雷达是连续发射电磁波的雷达发射信号是非调制的、多频率的或频率经过调制的。非调制(单一频率)连续波雷达通过测量运动物体的多普勒频移来计算物体的运动速度,能对相当距离范围内的具有任何速度的目标进行测速。非调制连续波雷达对目标只能测忠不能测距。不过可行适当的调制载波来同时得到目标的距离和速度信息,即适当调制信号的频率和相佐并经过对回波的数字信号处理来获得距离和速度信息。调制连续波雷达都能测距,多频连续波雷达还可W区分出活动目惊和静止目标。调频连续波雷达能测量活动目标的距离和速度信息。连续波雷达主要用于测高、近炸引信、多普勒导航、目标搜索跟踪和识别、交通管制、战场监视、导弹制导等方面。连续波体制霄达发射功率在一段时间内分配比较平均,功率不随时间明显变化。连续波雷达的发射频谱窄,电路简单;峰值功率小,更容易和简单的固态发射机兼容。由于连续波雷达不停的发射和接收电磁波,除了几乎无距离盲区的优点,同时也带来了发射电磁波直接泄漏到接收端造成的干扰和发射机本振信号直接泄漏到接收化的低噪声放大器或放大链路上的这些缺陷,会造成有源器件提前饱和,混频损耗增大,放大器增益降低1。
FMCW雷达的信号调制主要包括三角波调制、锯齿波调制、正弦波调制等几种不同的方式。由于正弦波调制检测物体时需要调节信号频偏,大多应用于只有一个探测目标的情况,比如高度计。FMCW雷达需要检测距离和速度等信息,而且通常希望检测多个目标,所以大多采用三角波调制和锯齿波调制。锯齿波调制主要用来测量物体的距离,而三角波调制可以同时得到物体的距离和速度信息2。
发展历史早在上世纪二十年代,人们己经开始使用FMCW雷达,当时Appleton和Barnett用调频连续波雷达进行大气电离层高度的测量实验。但由于其本身的一些局限,如很难做到收发隔离,这样就限制了雷达的发射功率不能太高,所以测量距离不像脉冲雷达那样可以达到几百公里或者上千公里。另外,模拟窄带滤波器组的使用也使得设备的规模非常庞大,在工程上使用价值不大。所以,之后相当长的一段时间内,FMCW雷达并没有得到人们的广泛关注,而仅仅局限于一些特定场合,如高度计等,相关理论上的一些难题没有得到深入的研究。
直到上世纪八十年代中期,荷兰的L.P.Lighthart等人在应用FMC W雷达进行气象方面的实验时,才对FMCW雷达的分辨力、模糊函数、接收机灵敏度等相关理论进行了详细的分析。1985年,美国的RB. Chadwick等人对FMCW雷达的距离速度祸合和旁瓣效应进行了深入研究。与此同时,国内外的学者对FMCW雷达中的一系列关键理论问题的研究逐渐展开。
到了九十年代,随着微波毫米波固态器件和数字信号处理器的高速发展,FMCW雷达也实现了重大的技术突破,可以实现调频连续波和毫米波雷达的结合,从而使其兼具调频连续波的优点及毫米波集成技术的优势,使得FMCW雷达的成本大幅下降,体积更小、重量更轻。
近年来,FMCW雷达的应用获得了很大的发展,也越来越多地被用到道路车辆监测记录系统、汽车防撞雷达、车流量检测器、自动驾驶等民用领域。1999年,奔驰汽车公司在其生产的S级高级轿车上率先采用了77GHz自适应巡航控制系统(ACC)。此后,越来越多的公司和供应商投入到汽车雷达系统的研制、器件开发和算法研究当中。2004年,富士通天公司研发了一款24GHz雷达,这款产品被安装在带有入侵传感器的自动报警器上,并被丰田的“皇冠”汽车所采用。随后,三菱和日立公司合作开发了一款FMCW车用防撞雷达,它的探测距离为120m。2013年,松下与富士通天均展示出可以检测出行人的79GHz频带毫米波雷达。随着前段单片微波集成电路(MMIC)和天线PCB板等硬件核心部分技术的不断成熟,以及信号处理技术的高速发展,小体积、低成本、高性能的FMCW雷达的大规模商用愈发可能。博世(Bosch)、大陆(Continental)、天合(TRW)、德尔福(Delphi)、海拉(Hella )、富士通(Fujitsu-ten)、电装(Denso)等公司都掌握了FMCW雷达的核心技术,并有成熟的产品应用在市场2。
FMCW雷达系统框架FMCW雷达的系统框图如图1所示,它主要由三部分组成:发射天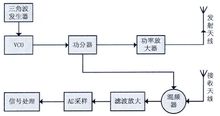 线和接收天线、功分器祸合器和混频器组成的射频前端、三角波发生器以及AD采样和信号处理的后端处理部分。
线和接收天线、功分器祸合器和混频器组成的射频前端、三角波发生器以及AD采样和信号处理的后端处理部分。
三角波发生器提供所需要的调制信号,经VCO控制产生频率在时间上按三角形变化的连续高频等幅波,一部分经放大后通过发射天线辐射出去,另一部分作为本振信号。在无线电波遇到目标后返回到接收天线,这时回波信号和本振信号相比频率产生了变化,经混频器出来后就是差拍信号。差拍信号的频率和目标的距离、速度有关,信号处理的主要任务就是提取出差拍信号的频率,并通过其得到目标真实的距离和速度等信息2。
工作原理连续波雷达的调制波有正弦调频波、三角波、锯齿波、平方律调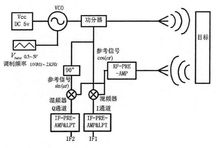 频波等各种调制波。应用最广泛的是属于线性调频连续波(LFMCW)的三角波和锯齿波。大多数汽车雷达中测距时既可以用锯齿波也可以用三角波,但如果想要同时测距和测速就需要用三角波才行。如果探测近距离目标(10~20m)时调制频率采用500Hz~1KHz,探测远距离目标(30~100m)时调制频率采用100~300Hz,在理论上调制信号频率最大不能超过250KHz。
频波等各种调制波。应用最广泛的是属于线性调频连续波(LFMCW)的三角波和锯齿波。大多数汽车雷达中测距时既可以用锯齿波也可以用三角波,但如果想要同时测距和测速就需要用三角波才行。如果探测近距离目标(10~20m)时调制频率采用500Hz~1KHz,探测远距离目标(30~100m)时调制频率采用100~300Hz,在理论上调制信号频率最大不能超过250KHz。
图2是FMCW雷达系统结构框图。由VCO输出一个调频信号,经功分器分成两路后,其中的一路信号分流成两路参考信号,一路参考信号先经90。的移相后进入Q通道的混频器中,另一路参考信号直接进入I通道的混频器中;而由功分器分出来另一路信号经发射天线发射出去。回波信号在分别与I、 Q通道中进入混频器两路参考信号进行混频之前,先由单独的接收天线将其接收到,再经低噪声放大器放大处理后,然后中频滤波放大处理得到I、 Q两通道中的中频信号1。
优点调频连续波(FMCW)雷达是通过对连续波进行频率调制,根据发射信号和回波信号的频率差、相位差来获取目标信息的一种雷达体制。与脉冲体制雷达相比,它具有以下优点:
(1)由雷达理论可知,距离分辨力是由雷达信号的带宽决定的,FMCW雷达具有较大的带宽,因此具有较高的距离分辨力。
(2)由于FMCW雷达的回波信号延时远小于发射信号的时宽,所以雷达发射机和接收机可以同时工作,不存在距离盲区。
(3)在一定噪声功率条件下,雷达的检侧能力由雷达信号的能量决定。FMCW雷达具有超大的时带积,远大于相同信号带宽和电平的脉冲雷达,所以在相同检测能力条件下,FMCW雷达发射功率低,不易被截获。
(4)由于FMCW雷达具有超大的时带积,所以不需要较高的峰值功率,这样它的工作电压就比较低,不需要使用高功率、高电压器件,从而使得整个系统结构简单,体积较小、重量较轻、成本较低2。
本词条内容贡献者为:
杜强 - 高级工程师 - 中国科学院工程热物理研究所
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国