

压电马达是利用压电体的压电逆效应进行机电能量转换的电动机。其原理与基于电磁感应的普通电动机显著不同,但基本功能和分类大致相同。
类型压电马达一般分为交流压电马达和直流压电马达。运动方式分为旋转和直线运动两种。压电马达由振动件和运动件两部分组成,没有绕组、磁体及绝缘结构。功率密度比普通马达高得多,但输出功率受限制,宜制成轻、薄、短小形式。它的输出多为低速大推力(或力矩),可实现直接驱动负载。这种电机因内部不存在磁场,机械振动频率在可听范围外,因此对外界的电磁干扰和噪声影响很小。压电马达易于大批量生产。
结构和工作原理压电马达的结构形式很多,但多数的动作原理相同,都是利用压电体在电压作用下发生振动,驱动运动件旋转或直线运动。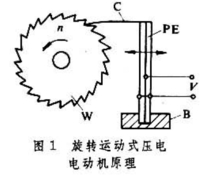
 图1中,压电体PE的一端固定于基座B,PE在电压V作用下产生振动,通过爪杆C使棘轮W旋转,获得旋转运动。图2中,薄壁圆筒状压电体PE的内外壁间加以电压V 时,就产生轴向伸缩运动。PE的两端各有一个电磁线圈W1和W2。W1通电时,产生的电磁力使PE一端固定于滑槽底座B上,另一端则随PE的伸缩在B的滑槽内位移。W2通电时,PE的固定端及位移端反之。只要W1和W2的通断间隔与PE的伸缩频率相适应,PE就可在B的滑槽内作单方向的位移,获得直线运动。
图1中,压电体PE的一端固定于基座B,PE在电压V作用下产生振动,通过爪杆C使棘轮W旋转,获得旋转运动。图2中,薄壁圆筒状压电体PE的内外壁间加以电压V 时,就产生轴向伸缩运动。PE的两端各有一个电磁线圈W1和W2。W1通电时,产生的电磁力使PE一端固定于滑槽底座B上,另一端则随PE的伸缩在B的滑槽内位移。W2通电时,PE的固定端及位移端反之。只要W1和W2的通断间隔与PE的伸缩频率相适应,PE就可在B的滑槽内作单方向的位移,获得直线运动。
由于一般压电体的能量转换效率较低,且振动或伸缩的幅值很小,因而只能制成特殊要求的专用马达,获得微小变位的蠕动。
超声波压电马达简介1981年,日本指田年生研制成超声波压电电动机,即超声波压电马达(简称超声波电动机),克服了传统压电电动机转换效率低和变位微小的缺陷,压电电动机开始进入工业实用阶段,如外径50毫米,输入电压100伏,频率40千赫,输出功率可达4瓦的超声波电动机。
分类超声波电动机有驻波式和行波式两种。驻波式超声波电动机的条状压电体具有交替排列的极化区,施加直流电压时产生伸缩交替的变形,收缩部分凸起,伸长部分下凹,整条呈波状。电压极性相反,变形方向随之改变。如施加交流电压,压电体就随时间作振动变形。此变形是一系列以极化界面为过零点的脉振波,即驻波振动。行波式超声波电动机由两条相同的压电体相互错开半个极化区长度粘合成一体而成,当分别施加时间上相差90°电角度的交流电压时,两压电体就分别作驻波振动,由弹性体接受的合成振动波是一个随时间前进的行波,即作行波振动。驻波形式的能量转换效率较高,但需特殊的推力或力矩耦合部件,体积较大,且只能作单向运动,控制性能差,因而人们更重视行波方式的超声波电动机。
原理将条状压电体制成圆板或圆环,即可制成旋转运动的超声波电动机。当弹性体接收压电体的行波振动后,通过转子上的摩擦件,利用摩擦力使转子旋转1。
一般超声波电动机要由20~200千赫的专用高频电源供电。电源需具有克服因温度变化而致频率漂移的自动频率调节功能和为保证二相交流电压时间相位相差90°电角度的鉴相及反馈控制环节。超声波电动机的转速与电源频率无关,转速-力矩特性的起始部分为略呈下垂的直线,因而既可作为精密驱动机构的驱动元件,也可在速度和位置伺服系统中作为执行元件。
特点及应用与传统电磁式电动机比较,压电超声马达有以下特点:1.结构简单,它的基本构成是振动部件和运动部件;2.单位体积转矩大,是相同体积的传统电动机的10倍;3.低速性能好,可以将转速调节到零,能在低速直接输出大转矩;4.制动转矩大,不需要附加制动器;断电可自锁等特了;5.机械时间常数小,响应快,控制精度高;6.没有磁场和电场,无电磁干扰和电磁噪声等1。
压电谐波马达工作原理压电谐波马达是根据谐波传动原理和压电逆效应原理,由kn组(n为波数,等于2或3;n= 2时,k=4,6,8,10等偶数,当n= 3时,k= 2,4等偶数)压电驱动器连接弹性铰链位移放大机构,沿柔轮圆周方向均匀分布,而构成压电式波发生器。通过控制器控制驱动各组压电驱动器,使各组压电驱动器彼此按一定的相差进行周期性伸缩变形,再经过位移放大器进行位移放大,使柔轮产生周期性的变形,如果是刚轮固定,通过柔轮和刚轮的啮合,便可使柔轮产生旋转1。
特点压电谐波电机将压电陶瓷驱动器和谐波传动装置结合在了一起,因此具有以下特点:(1)转速低,谐波传动装置作为减速器使用时,传动比较大,一般为50-300,而压电谐波电机通过控制压电波发生器的变形频率,便可获得很低的转速。(2)质量小,因为压电谐波马达为低速电机,仅柔轮缓慢旋转,且其质量较小。(3)响应快,压电驱动器的响应速度可达几微秒,而柔轮的惯量又较小,所以马达的响应速度很局。(4)运动精度高,因为柔轮和刚轮的啮合齿数可达30%,甚至更多。(5)控制性能好,容易同计算机进行接口,实现智能化,不需外加编码器等检测装置,通过微机及单片机进行程序控制各组压电驱动器的变形,很容易实现调速、换向、步数计算等多种功能。(6)效率高,由于运动部件数量少,而且柔轮和刚轮啮合齿面的速度很低,因此效率很高。(7)运动平稳,无冲击,无噪声。(8)不产生磁场,同时也不受磁场影响。基于压电谐波马达的以上特点,压电谐波马达在工业控制系统、超高精度仪器仪表、半导体制造设备、办公自动化设备、机器人、精密机械、航空航天等领域中将有着广阔的应用前景1。
工业发展对电机的要求低速传统电机都是以高速旋转的,一般为:2800,1400,960,720r/min四种转速,这种转速很难满足各种工业设备运行的需要,90%的电机必须与庞大的减速机构配套使用。在伺服系统中,电机采用齿轮传动后,不仅使系统尺寸、重量增加,而且造成噪声、增加惯量及降低效率。同时,由于齿轮啮合精度的限制,在要求正反转和平稳快速反应时,齿轮转动往往影响系统性能。所以,低速电机的开发势在必行1。
微小型化微电机是自主运动的微系统核心元件,是微机械研究的重要内容之一。目前,微电机研究一方面是优化现有微电机的结构,以提高输出特性,另一方面是探索新结构的微电机。微电机的研究已在静电微电机、电磁微电机和压电微电机三个方向,取得了一定进展。其中,静电微电机采用的是静电力驱动的。静电力属表面作用力,随尺寸减小其作用相对增强,但是,电机中的摩擦力和粘滞力也较强,因而,静电电机力矩较小,难以应用。电磁微电机采用传统电磁驱动方式,利用精密机械加工或IC工艺,实现小型化,已在毫米级微电机研制中取得较大进展。但由于y寸效应”影响,进一步微型化面临困难。压电微电机采用摩擦力为驱动力,尺寸效应的负面影响较小,可能成为有前途的微机械动力源。
高精度产业机械机构传动及加工主要来自于马达的机械性能,同时其定位功能也直接关系机械运动的精确度,因此优良的马达定位技术是许多工业控制器的必备条件。由于控制马达常见的种类有步进马达、交流伺服马达及直流伺服马达,其中伺服马达的定位功能是产业机械向自动化发展的重要基本因素。近年来集成电路、电子制造业蓬勃发展,对高速而精准的马达点对点运动有迫切的需求1。
本词条内容贡献者为:
方正 - 副教授 - 江南大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国