

连杆机构(Linkage Mechanism)又称低副机构,是机械的组成部分中的一类,指由若干(两个以上)有确定相对运动的构件用低副(转动副或移动副)联接组成的机构。
平面连杆机构是一种常见的传动机构,其最基本也是应用最广泛的一种型式是由四个构件组成的平面四杆机构。由于机构中的多数构件呈杆状,所以常称杆状构件为杆。1低副是面接触,耐磨损;加上转动副和移动副的接触表面是圆柱面和平面,制造简便,易于获得较高的制造精度。连杆机构广泛应用于各种机械和仪表中。2
概念定义由若干刚性构件用低副联接而成的机构称为连杆机构,其特征是有一作平面运动的构件,称为连杆,连杆机构又称为低副机构。其广泛应用于内燃机、搅拌机、输送机、椭圆仪、机械手爪、牛头刨床、开窗、车门、机器人、折叠伞等。
平面连杆机构在各种机械和仪器中获得广泛应用。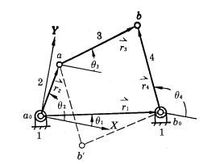 最简单的平面连杆机构是由四个构件组成的,称为平面四杆机构。它的应用非常广泛,而且是组成多杆机构的基础。
最简单的平面连杆机构是由四个构件组成的,称为平面四杆机构。它的应用非常广泛,而且是组成多杆机构的基础。
由若干个刚性构件通过低副(转动副、移动副))联接,且各构件上各点的运动平面均相互平行的机构,又称平面低副机构。低副具有压强小、磨损轻、易于加工和几何形状能保证本身封闭等优点,故平面连杆机构广泛用于各种机械和仪器中。与高副机构相比,它难以准确实现预期运动,设计计算复杂。
平面连杆机构中最常用的是四杆机构,它的构件数目最少,且能转换运动。多于四杆的平面连杆机构称多杆机构,它能实现一些复杂的运动,但杆多且稳定性差。
组成类型根据构件之间的相对运动为平面运动或空间运动,连杆机构可分为平面连杆机构和空间连杆机构。平面连杆机构是一种常见的传动机构。它是指刚性构件全部用低副联接而成,故又称低副机构。平面连杆机构广泛应用于各种机器、仪器以及操纵控制装置中。如往复式发动机、抽水机和空气压缩机以及牛头刨床、插床、挖掘机、装卸机、颚式破碎机、摆动输送机、印刷机械、纺织机械等的主要机构都是平面连杆机构。在连杆机构中,若构件不在同一平面或相互平行的平面内运动的机构称为空间机构(spatial mechanism)。3根据机构中构件数目的多少分为四杆机构、五杆机构、六杆机构等,一般将五杆及五杆以上的连杆机构称为多杆机构。当连杆机构的自由度为1时,称为单自由度连杆机构;当自由度大于1时,称为多自由度连杆机构。
根据形成连杆机构的运动链是开链还是闭链,亦可将相应的连杆机构分为开链连杆机构(机械手通常是运动副为转动副或移动副的空间开链连杆机构)和闭链连杆机构。单闭环的平面连杆机构的构件数至少为4,因而最简单的平面闭链连杆机构是四杆机构,其他多杆闭链机构无非是在其基础上扩充杆组而成;单闭环的空间连杆机构的构件数至少为3,因而可由三个构件组成空间三杆机构。
主要特征连杆机构构件运动形式多样,如可实现转动、摆动、移动和平面或空间复杂运动,从而可用于实现已知运动规律和已知轨迹。
优点:(1)采用低副:面接触、承载大、便于润滑、不易磨损,形状简单、易加工、容易获得较高的制造精 度。
(2)改变杆的相对长度,从动件运动规律不同。
(3)两构件之间的接触是靠本身的几何封闭来维系的,它不像凸轮机构有时需利用弹簧等力封闭来 保持接触。
(4)连杆曲线丰富,可满足不同要求。4
缺点:(1)构件和运动副多,累积误差大、运动精度低、效率低。
(2)产生动载荷(惯性力),且不易平衡,不适合高速。
(3)设计复杂,难以实现精确的轨迹。
因此,平面连杆机构广泛应用于各种机械、仪表和机电产品中。随着连杆机构设计方法的发展,电子计算机的普及应用以及有关设计软件的开发,连杆机构的设计速度和设计精度有了较大的提高,而且在满足运动学要求的同时,还可考虑到动力学特性。尤其是微电子技术及自动控制技术的引入,多自由度连杆机构的采用,使连杆机构的结构和设计大为简化,使用范围更为广泛。
理论应用动力机的驱动轴一般整周转动,因此机构中被驱动的主动件应是绕机架作整周转动的曲柄在形成铰链四杆机构的运动链中,a、b、c、d既代表各杆长度又是各杆的符号。当满足最短杆和最长杆之和小于或等于其他两杆长度之和时,若将最短杆的邻杆固定其一,则最短杆即为曲柄。
若铰链四杆机构中最短杆与最长杆长度之和小于或等于其余两杆长度之和,则
a、 取最短杆的邻杆为机架时,构成曲柄摇杆机构;
b、 取最短杆为机架时,构成双曲柄机构;
c、 取最短杆为连杆时,构成双摇杆机构;
若铰链四杆机构中最短杆与最长杆长度之和大于其余两杆长度之和,则无曲柄存在,不论以哪一杆为机架,只能构成双摇杆机构2。
急回系数在曲柄等速运动、从动件变速运动的连杆机构中,要求从动件能快速返回,以提高效率。即 k称为急回系数。
k称为急回系数。
压力角如图2a中的曲柄摇杆机构,若不计运动副的摩擦力和构件的惯性力,则曲柄a通过连杆b作用于摇杆c上的力P,与其作用点B的速度vB之间的夹角α称为摇杆的压力角,压力角越大,P在vB方向的有效分力就越小,传动也越困难,压力角的余角γ称为传动角。在机构设计时应限制其最大压力角或最小传动角。
死点在曲柄摇杆机构中,若以摇杆为主动件,则当曲柄和连杆处于一直线位置时,连杆传给曲柄的力不能产生使曲柄回转的力矩,以致机构不能起动,这个位置称为死点。机构在起动时应避开死点位置,而在运动过程中则常利用惯性来过渡死点。
本词条内容贡献者为:
王强 - 副教授 - 西南大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国