

概述
振动模态是弹性结构固有的、整体的特性。通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内的各阶主要模态的特性,就可以预言结构在此频段内在外部或内部各种振源作用下产生的实际振动响应。因此,模态分析是结构动态设计及设备故障诊断的重要方法。
机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动模态各不相同。模态分析提供了研究各类振动特性的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构物的模态参数,从而建立起结构物的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物的实际振动的响应历程或响应谱。
近十多年来,由于计算机技术、FFT分析仪、高速数据采集系统以及振动传感器、激励器等技术的发展,试验模态分析得到了很快的发展,受到了机械、电力、建筑、水利、航空、航天等许多产业部门的高度重视。已有多种档次、各种原理的模态分析硬件与软件问世。1
详细说明经典定义模态分析的经典定义:将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。坐标变换的变换矩阵为模态矩阵,其每列为模态振型。
用处模态分析的最终目标是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。
模态分析技术的应用可归结为以下几个方面:
1) 评价现有结构系统的动态特性;
2) 在新产品设计中进行结构动态特性的预估和优化设计;
3) 诊断及预报结构系统的故障;
4) 控制结构的辐射噪声;
5) 识别结构系统的载荷。
最佳悬挂点模态试验时,一般希望将悬挂点选择在振幅较小的位置,最佳悬挂点应该是某阶振型的节点。
最佳激励点最佳激励点视待测试的振型而定,若单阶,则应选择最大振幅点,若多阶,则激励点处各阶的振幅都不小于某一值。如果是需要许多能量才能激励的结构,可以考虑多选择几个激励点。
最佳测试点模态试验时测试点所得到的信息要求有尽可能高的信噪比,因此测试点不应该靠近节点。在最佳测试点位置其ADDOF(Average Driving DOF Displacement)值应该较大,一般可用EI(Effective Independance)法确定最佳测试点。
模态参数模态参数有:模态频率、模态振型、模态质量、模态向量、模态刚度和模态阻尼等。2
主模态主空间主坐标无阻尼系统的各阶模态称为主模态,各阶模态向量所张成的空间称为主空间,其相应的模态坐标称为主坐标。
模态截断理想的情况下我们希望得到一个结构的完整的模态集,实际应用中这既不可能也不必要。实际上并非所有的模态对响应的贡献都是相同的。对低频响应来说,高阶模态的影响较小。对实际结构而言,我们感兴趣的往往是它的前几阶或十几阶模态,更高的模态常常被舍弃。这样尽管会造成一点误差,但频响函数的矩阵阶数会大大减小,使工作量大为减小。这种处理方法称为模态截断。
实模态和复模态按照模态参数(主要指模态频率及模态向量)是实数还是复数,模态可以分为实模态和复模态。对于无阻尼或比例阻尼振动系统,其各点的振动相位差为零或180度,其模态系数是实数,此时为实模态;对于非比例阻尼振动系统,各点除了振幅不同外相位差也不一定为零或180度,这样模态系数就是复数,即形成复模态。
有限元分析1)利用有限元分析模型确定模态试验的测量点、激励点、支持点(悬挂点),参照计算振型对测试模态参数进行辩识命名,尤其是对于复杂结构很重要。
2)利用试验结果对有限元分析模型进行修改,以达到行业标准或国家标准要求。
3)利用有限元模型对试验条件所产生的误差进行仿真分析,如边界条件模拟、附加质量、附加刚度所带来的误差及其消除。
4)两套模型频谱一致性和振型相关性分析。
5)利用有限元模型仿真分析解决实验中出现的问题!
修正有限元分析的结果用试验模态分析的结果怎么修正有限元分析的结果?
1)结构设计参数的修正,可用优化方法进行。
2)子结构校正因子修正。
3)结构矩阵元素修正,包括非零元素和全元素修正两种。
4)刚度矩阵和质量矩阵同时修正3
过程(1)动态数据的采集及频响函数或脉冲响应函数分析
1)激励方法。试验模态分析是人为地对结构物施加一定动态激励,采集各点的振动响应信号及激振力信号,根据力及响应信号,用各种参数识别方法获取模态参数。激励方法不同,相应识别方法也不同。目前主要由单输入单输出(SISO)、单输入多输出(SIMO)多输入多输出(MIMO)三种方法。以输入力的信号特征还可分为正弦慢扫描、正弦快扫描、稳态随机(包括白噪声、宽带噪声或伪随机)、瞬态激励(包括随机脉冲激励)等。
2)数据采集。SISO方法要求同时高速采集输入与输出两个点的信号,用不断移动激励点位置或响应点位置的办法取得振形数据。SIMO及MIMO的方法则要求大量通道数据的高速并行采集,因此要求大量的振动测量传感器或激振器,试验成本较高。
3)时域或频域信号处理。例如谱分析、传递函数估计、脉冲响应测量以及滤波、相关分析等。
(2)建立结构数学模型 根据已知条件,建立一种描述结构状态及特性的模型,作为计算及识别参数依据。目前一般假定系统为线性的。由于采用的识别方法不同,也分为频域建模和时域建模。根据阻尼特性及频率耦合程度分为实模态或复模态模型等。
(3)参数识别 按识别域的不同可分为频域法、时域法和混合域法,后者是指在时域识别复特征值,再回到频域中识别振型,激励方式不同(SISO、SIMO、MIMO),相应的参数识别方法也不尽相同。并非越复杂的方法识别的结果越可靠。 对于目前能够进行的大多数不是十分复杂的结构,只要取得了可靠的频响数据,即使用较简单的识别方法也可能获得良好的模态参数;反之,即使用最复杂的数学模型、最高级的拟合方法,如果频响测量数据不可靠,则识别的结果一定不会理想。
(4)振形动画 参数识别的结果得到了结构的模态参数模型,即一组固有频率、模态阻尼以及相应各阶模态的振形。由于结构复杂,由许多自由度组成的振形也相当复杂,必须采用动画的方法,将放大了的振形叠加到原始的几何形状上。
以上四个步骤是模态试验及分析的主要过程。而支持这个过程的除了激振拾振装置、双通道FFT分析仪、台式或便携式计算机等硬件外,还要有一个完善的模态分析软件包。通用的模态分析软件包必须适合各种结构物的几何物征,设置多种坐标系,划分多个子结构,具有多种拟合方法,并能将结构的模态振动在屏幕上三维实时动画显示。
2.结构动力修改与灵敏度分析
结构动力修改(Structure Dynamic Modify——SDM)有两个含义:①如果机器作了某种设计上的修改,它的动力学特性将会有何种变化?这个问题被称为SDM的正问题。②如果要求结构动力学参数作某种改变,应该对设计作何种修改?这是SDM的反问题。
上述两个问题,如果局限在有限元计算模型内解决,其正问题是比较简单的,即只要改变参数重新计算一次就可以。其反问题就是特征值的反问题,由于结构的复杂性和数学处理的难度较大,目前在理论上还不完善。只有涉及雅可比矩阵的问题得到了比较完善的解决,相应的力学模型是弹簧质量单向串联系统或杆件经过有限元或差分法离散的系统。此外,特征值反问题的解决要求未修改系统计算的特征值及特征向量是精确的。因此,现在通常所指的SDM是指在试验模态分析基础上的。
不论是结构动力修改的正问题还是反问题,都要涉及针对结构进行修改。为了避免修改的盲目性,人们自然要问,如何修改才是最见成效的?换而言之,对一个机械系统,是进行质量修改,还是进行刚度修改?质量或刚度修改时,在机械结构上何处修改才是最灵敏部位,使得以较少的修改量得到较大的收获?由此,引出了结构动力修改中的灵敏度分析技术。目前较为常见的是基于摄动的灵敏度分析。
模态分析技术从20世纪60年代后期发展至今已趋成熟,它和有限元分析技术一起成为结构动力学的两大支柱。模态分析作为一种“逆问题”分析方法,是建立在实验基础上的,采用实验与理论相结合的方法来处理工程中的振动问题。4
实例解释简单地说,模态分析是根据用结构的固有特征,包括频率、阻尼和模态振型,这些动力学属性去描述结构的过程。那只是一句总结性的语言,现在让我来解释模态分析到底是怎样的一个过程。不涉及太多的技术方面的知识,我经常用一块平板的振动模式来简单地解释模态分析。这个解释过程对于那些振动和模态分析的新手们通常是有用的。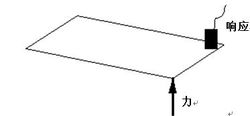
考虑自由支撑的平板,在平板的一角施加一个常力,由静力学可知,一个静态力会引起平板的某种静态变形。但是在这儿我要施加的是一个以正弦方式变化,且频率固定的振荡常力。改变此力的振动频率,但是力的峰值保持不变,仅仅是改变力的振动频率。同时在平板另一个角点安装一个加速度传感器,测量由此激励力引起的平板响应。
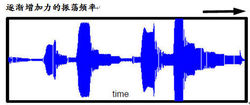
现在如果我们测量平板的响应,会注意到平板的响应幅值随着激励力的振动频率的变化而变化。随着时间的推进,响应幅值在不同的频率处有增也有减。这似乎很怪异,因为我们对此系统仅施加了一个常力,而响应幅值的变化却依赖于激励力的振动频率。具体到现在,当我们施加的激励力的振动频率越来越接近系统的固有频率(或者共振频率)时,响应幅值会越来越大,在激励力的振动频率等于系统的共振频率时达到最大值。想想看,真令人大为惊奇,因为施加的外力峰值始终相同,而仅仅是改变其振动频率。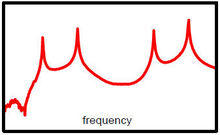
时域数据提供了非常有用的信息,但是如果用快速傅立叶变换(FFT)将时域数据转换到频域,可以计算出所谓的频响函数(FRF)。这个函数有一些非常有趣的信息值得关注:注意到频响函数的峰值出现在系统的共振频率处,注意到频响函数的这些峰出现在观测到的时域响应信号的幅值达到最大时刻的频率处。
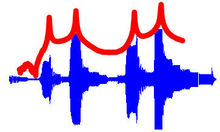
如果我们将频响函数叠加在时域波形之上,会发现时域波形幅值达到最大值时的激励力振动频率等于频响函数峰值处的频率。因此可以看出,既可以使用时域信号确定系统的固有频率,也可以使用频响函数确定这些固有频率。显然,频响函数更易于估计系统的固有频率。许多人惊奇结构怎么会有这些固有特征,而更让人惊奇的是在不同的固有频率处,结构呈现的变形模式也不同,且这些变形模式依赖于激励力的频率。
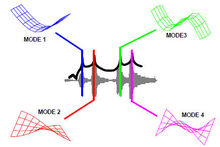
现在让我们了解结构在每一个固有频率处的变形模式。在平板上均匀分布45个加速度计,用于测量平板在不同激励频率下的响应幅值。如果激励力在结构的每一个固有频率处驻留,会发现结构本身存在特定的变形模式。这个特征表明激励频率与系统的某一阶固有频率相等时,会导致结构产生相应的变形模式。我们注意到当激励频率在第一阶固有频率处驻留时,平板发生了第1阶弯曲变形,在图中用蓝色表示。在第2阶固有频率处驻留时,平板发生了第2阶扭转变形,在图中用红色表示。分别在结构的第3和第4阶固有频率处驻留时,平板发生了第3阶弯曲变形,在图中用绿色表示,和第4阶扭转变形,在图中用红紫红色表示。这些变形模式称为结构的模态振型。(从纯数学角度讲,这种叫法实际上不完全正确,但在这儿作为简单的讨论,从实际应用角度讲,这些变形模式非常接近模态振型。)
我们设计的所有结构都具有各自的固有频率和模态振型。本质上,这些特性取决于确定结构固有频率和模态振型的结构质量和刚度分布。作为一名设计工程师,需要识别这些频率,并且当有外力激励结构时,应知道它们怎样影响结构的响应。理解模态振型和结构怎样振动有助于设计工程师设计更优的结构。模态分析有太多的需要讲解的地方,但这个例子仅仅是一个非常简单的解释。现在我们能更好地理解模态分析主要是研究结构的固有特性。理解固有频率和模态振型(依赖结构的质量和刚度分布)有助于设计噪声和振动应用方面的结构系统。我们使用模态分析有助于设计所有类型的结构,包括机车、航天器,宇宙飞船、计算机、网球拍、高尔夫球杆……这些清单举不胜举。
结构模态分析模态向量有一个很重要的特性,即“模态正交性'”。所谓模态分析法,就是利用系统固有的模态的正交性,以系统的各阶模态向量所组成的模态矩阵作为交换矩阵,对通常选取的物理坐标进行线性变换,使得振动系统以物理坐标和物理参数所描述、互相祸合的运动方程组,能够变为一组彼此独立的方程,每个独立方程只含一个独立的模态坐标。这个用模态坐标和模态参数所描述的各个独立方程,称为模态方程。模态分析实质上是一种坐标变换,其目的是为了解除方程的祸合,便于求解由于坐标变换是线性变换,因而系统在原有的物理系统中,对于任意激励的响应,便可视为系统各阶模态的线性组合,故模态分析法,又称模态叠加法。而各阶模态在叠加中所占的比重或加权系数,则取决于各阶的模态坐标响应`。一般来说,高阶模态比低阶模态的加权系数要小得多,通常只需要选取前阶模态进行叠加,即可达到足够的精度。由此可知模态分析的主要优点就在于,它能用较少的运动方程或自由度数,直观、简明而又相当精确的去反映一个比较复杂结构的动态特性,从而大大减小测量、分析及计算的工作量。
模态分析的基本假设线性假设假设被实验识别系统是线性的,其物理意义是,结构系统对任一组同时作用的激励的响应是该组内每一激励单独作用时系统的响应的线性叠加。基于这一个假设,我们有可能在实验室内对系统施加容易实现、便于测量的作用力进行激励,并由此提取被测系统的特征参数,而不必施加与工作环境相同的激励。
时不变假设系统是定常的,即系统特征参数为常量,满足该假设的系统称之为定常系统。例如,假设系统某特征参数与温度有关,则当温度随时间变化时,系统的特征参数也随之变化,则系统不满足时不变假设,称这样的系统为非时不变系统。如果系统为非时不变系统,那么在不同时刻所测实验数据将不一致,从而得不到稳定的系统特征参数。
可观测性对于系统输入、输出的量测量结果应含有足够的信息,以描述该系统适当特性的模型,否则称该系统为不可观测系统。此外还常常假设结构遵从互异性原理,即在点输入所引起的点的响应,等于在点的相同输入所引起的点的响应。此假设使得质量矩阵、刚度矩阵、阻尼矩阵和频响函数矩阵都成了对称矩阵。5
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国