

空间解释
设有空间两点,若以P1为始点,另一点P2为终点的线段称为有向线段。通过原点作一与其平行且同向的有向线段,将与Ox,Oy,Oz三个坐标轴正向夹角分别记作α,β,γ。这三个角α,β,γ称为有向线段的方向角,其中0≤α≤π,0≤β≤π,0≤γ≤π。若有向线段的方向确定了,则其方向角也是唯一确定的。
方向角的余弦称为有向线段或相应的有向线段的方向余弦。
解析几何在解析几何里,一个向量的三个方向余弦分别是这向量与三个坐标轴之间的角度的余弦。
假设 是三维空间里的向量:1
是三维空间里的向量:1
 ;
;
其中, 是一组标准正交基的单位基底向量,
是一组标准正交基的单位基底向量, 分别为
分别为 对于x-轴、y-轴、z-轴的分量。
对于x-轴、y-轴、z-轴的分量。
那么, 对于x-轴、y-轴、z-轴的方向余弦 分别为
分别为

其中, 分别为
分别为 对于x-轴、y-轴、z-轴的角度。
对于x-轴、y-轴、z-轴的角度。
注意到以下恒等式:

加以推广,两个向量之间的方向余弦指的是这两个向量之间的角度的余弦。“方向余弦矩阵”是由两组不同的标准正交基的基底向量之间的方向余弦所形成的矩阵。方向余弦矩阵可以用来表达一组标准正交基与另一组标准正交基之间的关系,也可以用来表达一个向量对于另一组标准正交基的方向余弦。
刚体取向通常,整个刚体的空间位形可以简易地以以下参数设定:2
刚体的“位置”:挑选刚体内部一点G来代表整个刚体,通常会设定物体的质心或形心为这一点。从空间参考系S观测,点G的位置就是整个刚体在空间的位置。表示位置可以应用向量的概念。向量的起点为参考系S的原点,终点为点G。设定刚体的位置需要三个坐标,例如,采用直角坐标系,这三个坐标为x-坐标、y-坐标、z-坐标。这用掉了三个自由度。
刚体的取向:描述刚体取向的方法有好几种,包括方向余弦、欧拉角、四元数等等。这些方法设定一个附体参考系B的取向(相对于空间参考系S)。附体参考系是固定于刚体的参考系。相对于刚体,附体参考系的取向固定不变。由于刚体可能会呈加速度运动,所以附体参考系可能不是惯性参考系。空间参考系是某设定惯性参考系,例如,在观测飞机的飞行运动时,附着于飞机场控制塔的参考系可以设定为空间参考系,而附着于飞机的参考系则可设定为附体参考系。刚体的取向需要用到另外三个自由度。
方向余弦方法可以用来设定附体参考系B的取向,即刚体的取向。假设沿着参考系S的坐标轴的三个单位向量分别为  ,沿着参考系B的坐标轴的三个单位向量分别为
,沿着参考系B的坐标轴的三个单位向量分别为 。定义
。定义 与
与 之间的方向余弦
之间的方向余弦 为
为
 ;
;
其中, 是
是  与
与 之间的夹角。
之间的夹角。
 与
与 之间的关系分别为
之间的关系分别为
 、
、
 、
、
 。
。
两个参考系的坐标轴所形成的矩阵称为“方向余弦矩阵” A :
 。
。
采用爱因斯坦求和约定,由于 ,给定方向余弦矩阵A ,则可设定附体参考系B的取向,也就是刚体的取向。
,给定方向余弦矩阵A ,则可设定附体参考系B的取向,也就是刚体的取向。
反过来,经过一番运算,可以得到  。
。
给定位置向量
 ,
,
则与  的内积为
的内积为
 。
。
方向余弦矩阵A可以将从空间参考系S观测的位置坐标 ,变换为从附体参考系B观测的位置坐标
,变换为从附体参考系B观测的位置坐标 ,因此又称为“变换矩阵”。
,因此又称为“变换矩阵”。
变换矩阵 A 也可以做反变换如下:
 。
。
变换矩阵 A是一种正交矩阵,满足“正交条件”
 ;
;
其中, 是克罗内克函数。
是克罗内克函数。
注意到 与
与 不同,夹角
不同,夹角  是
是 与空间参考系S的坐标轴单位向量
与空间参考系S的坐标轴单位向量  之间的夹角。变换矩阵A通常不是对称矩阵。
之间的夹角。变换矩阵A通常不是对称矩阵。
变换矩阵A 可以视为旋转矩阵。例如,将附体参考系B或刚体旋转,从  旋转
旋转 角弧成为
角弧成为 ;其中,
;其中, 。对于这旋转,旋转矩阵A为
。对于这旋转,旋转矩阵A为
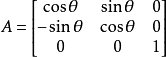 。
。
参考轴 与
与  之间的关系为
之间的关系为
 。
。
旋转矩阵A也可以视为将点P的位置向量  旋转
旋转 角弧成为点P'的位置向量
角弧成为点P'的位置向量 :
:
 。
。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国