

开环控制电路是与控制对象只存在单向作用而没有反馈联系的控制电路。
正文与控制对象只存在单向作用而没有反馈联系的控制电路。例如晶闸管供电的直流电动机开环控制系统(图1)。Ug作为系统的输入量,经过触发电路控制着晶闸管整流电路的输出电压,从而控制了电动机的转速,转速n称为输出量。这样,一定输入量Ug对应着一定的转速n。由图可见,该系统只有输入量对输出量的控制作用,而没有输出量再返回来影响系统控制作用的能力,这种系统叫开环控制系统。在忽略了一些次要因数后,可写出方程式联立求解上述方程可得转速n的表达式,即为开环系统的机械特性方程式式中Kc为晶闸管整流电路的放大系数,R∑为电枢回路总电阻,Ce为电动机的电动势系数,n0为开环系统电动机的理想空载转速,Δn为开环系统电动机的静态转速降。根据系统各环节的静态关系可以画出开环系统静态结构图(图2)。从结构图可以看出,在控制通道中,只有输入量Ug对输出量n产生控制作用。电枢压降IdR∑是负载扰动,当负载扰动IdR∑变化时,如果没有人工干预,则输出量n必将改变。这说明开环系统抗扰动能力是很差的,它对控制过程中可能出现的偏差没有任何修正能力。因此它的控制精度较低,常用在要求不高的场合。
闭环控制电路闭环控制电路是指与控制对象存在反馈联系的控制电路。开环控制电路结构简单,成本低,但控制精度较低。为在系统中保持转速的恒定,可以加入一些测量比较元件组成闭环系统。
与控制对象存在反馈联系的控制电路。开环控制电路结构简单,成本低,但控制精度较低。为在系统中保持转速的恒定,可以加入一些测量比较元件组成闭环系统(图1)。
闭环控制测速发电机SF(图中TG)就是测量元件。将测速发电机的电压取出一部分Uf与给定电压Ug反向串联,并将差值ΔU作为放大器的输入信号,即ΔU=Ug-Uf。自动调速过程如下:设电动机(M)原来稳定工作于额定转速,若负载突然增大,主回路电压降增大,电动机转速下降,反馈电压Uf也随之下降。由于给定电压Ug没有变,所以加到放大器输入端的电压ΔU 便自动升高,它使晶闸管整流电路输出电压Ud增加,补偿了所增大的电压降,于是电动机转速又回升到接近原来的数值。反馈作用有两种情况,若反馈信号和原输入信号极性相同叫正反馈;反之,叫负反馈。正反馈使系统放大倍数增大,负反馈使系统放大倍数减小。在自动控制系统中主要应用的是负反馈。在单闭环调速系统中,忽略一些次要因数后,各环节的静态(稳态)规律如下:电压比较环节ΔU=Ug-Uf;放大器Uk=KpΔU;触发器及晶闸管整流装置Ud=KsUk;晶闸管-电动机系统开环机械特性n=(Ud-IdR∑)/Ce;测速发电机Uf=αn。以上各式中,Kp是放大器的电压放大倍数;Ks是晶闸管装置的电压放大倍数;α 是测速发电机的反馈系数。上述关系式中消去中间变量,可得转速负反馈单闭环调速系统的静特性方程式1。
式中K=KpKsα/Ce,叫做闭环系统的开环放大倍数,它好象是在测速发电机输出端把反馈回路断开,从放大器输入一直到测速发电机输出的总的电压放大倍数,是各个环节单独放大倍数的乘积。这里是以1/Ce=n/ED作为电动机环节的“放大倍数”的。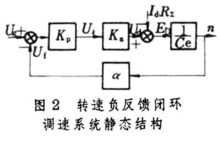
闭环调速系统的静特性根据调速系统各环节的静态关系式可以画出系统的静态结构图(图2) 。图中各方块中的符号是该环节的放大倍数
。图中各方块中的符号是该环节的放大倍数
分别表示开环和闭环系统的机械特性。可见,只要系统的开环放大倍数K足够大,总可以把闭环系统的静态转速降Δпb减小到允许的范围,并把调速范围提高到预定的要求。
本词条内容贡献者为:
李雪梅 - 副教授 - 西南大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国