

热灵敏度(NETD)(噪声等效温差)是评价中波 (MWIR)和长波(LWIR)红外热像仪的关键参数。它是一个代表温差的信噪比的数值,这个温差信号等同于热像仪的瞬时噪声。因此,它近似代表热像仪可以分辨的最小温差。1直接关系了热像仪测量的清晰度,热灵敏的数值越小,表示其灵敏度越高,图像更清晰。
热灵敏度的计算NEDT(噪声等效温差)是评价中波(MWIR)和长波(LWIR)红外热像仪的关键参数。它是一个代表温差的信噪比的数值,这个温差信号等同于热像仪的瞬时噪声。因此,它近似代表热像仪可以分辨的最小温差。
它是由瞬时噪声除以响应度,通常由mK表示。这个值是热像仪的光圈数、积分时间和测量时的具体温度的函数。要测量它的话您需要一台高质量的面源黑体。将黑体设置在25°C。热像仪应置于最近距离(2到5 cm)。对于中红外热像仪,设置积分时间使得在热像仪探测器(FPA)的动态范围在大约一半位置,并不要安装镜头。
对于非制冷长波红外热像仪,积分时间设置为最大值,并安装标准的25mm镜头。2个点的非均一化校正执行以后会得到一个均一化的图像。并且有3组数据会通过热像仪的数字输出获得。
对于第一组数据,把黑体温度设置为20°C并连续采集64帧数据。计算这些帧的平均值后得到每个像素组成的新阵列,它代表了20°C时的响应值。其单位是A/D计数值。
对于第二组数据,把黑体温度设置为25°C并连续采集128帧数据。把128帧每个像素的数据取标准差。然后把这些标准差值作为一个矩阵代表了瞬时噪声。其单位是A/D计数值。
对于第三组数据,把黑体温度设置为30°C,和第一组数据一样连续采集64帧数据。计算这些帧的平均值后得到每个像素组成的新阵列,它代表了30°C响应值。其单位是A/D计数值。从30°C的响应矩阵减去20°C的响应矩阵,然后除以10,然后得到一个响应度矩阵,其单位是计数值每度。然后用响应度矩阵除瞬时噪声矩阵,得到NEDT矩阵,其单位是K。算出所有像素的平均值(消除坏点)后,乘以1000,得到以mK为单位的数值2。
功能试验为验证不同热灵敏度对图像拍摄效果的影响,我们做了以下实验:
均选用160 *120红外像素的传感器,在温标固定的状态下,使用具备不同热灵敏度的仪器进行拍摄,结果如下:
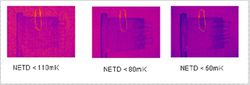
结论:在不同热灵敏下,呈现的图片效果也截然不同, 灵敏度的数值越小,代表热灵敏度越优,图片越清晰。
产品介绍testo 全线红外热像仪产品均配置了最佳测量性能的热灵敏度,最优可达
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国