

失锁涵义表示环路既不锁定,也不跟踪,环路所处的工作状态。失锁通过环路调节作用可能有两种不同结果:其一:可能使环路无法再锁定;其二:可能使环路再锁定。这是通常失锁状态总是指这种情况失锁是锁相环的固有属性,引起失锁的原因归纳起来有以下几点:1、过大的频率阶跃;2、过大的频率斜升;3、过大的噪声干扰。
概念失锁是从锁相环而来的,要理解失锁先了解下什么是锁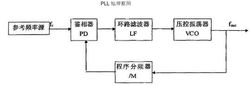 相环。
相环。
锁相环(phase-locked loop)为无线电发射中使频率较为稳定的一种方法,主要有VCO(压控振荡器)和PLL IC,压控振荡器给出一个信号,一部分作为输出,另一部分通过分频与PLL IC所产生的本振信号比较,为了保持频率不变,就要求相位差不发生改变,如果有相位差的变化,则PLL IC的电压输出端电压发生变化,去控制VCO,直到相位差恢复,达到频锁的目的,使受控振荡器的频率和相位均与输入信号保持确定关系的闭环电子电路。
扩频码跟踪及同步失锁的研究与实现随着通信技术、超大规模集成电路和计算机技术的发展,以及扩频通信理论的不断深入研究和成熟,扩频通信从军用不断向民用方面普及,广泛应用于蜂窝电话、无绳电话、微波通信、无线数据通信、遥测、监控等各种系统。
同步是直接序列扩频通信系统接收端的关键技术,也是影响其性能的重要指标。扩频同步是一个相关的过程,是利用伪随机序列的相关性能来实现的。伪随机序列具有尖锐的自相关函数和接近于0的互相关函数值。同步一般包括两个过程:粗同步和细同步。粗同步即捕获,是让本地PN码与接收到PN码相位的定时误差在半个码元周期以内。细同步即跟踪,它要完成两个功能:首先,继续保持同步,进一步减小PN码的相位差,一般可以保持在1/4或1/8个码元周期内;同时,它要完成跟踪的过程,当由于外界因素(信道时延和外部干扰等)使接收到的PN码相位发生偏移,同步系统能够加以调整,通过改变本地PN码相位,使收发信机仍然同步,达到跟踪PN码相位改变的目的。1
扩频同步原理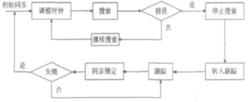 根据文献,同步过程的一般流程如下:首先对输入信号进行捕获处理,以搜索有用信号。一旦捕获成功,停止搜索,进入跟踪过程。与此同时,不断地对有用信号进行检测,一旦发现由于某种原因引起同步丢失,则重新开始新一轮的捕获和跟踪。同步流程如图1所示。
根据文献,同步过程的一般流程如下:首先对输入信号进行捕获处理,以搜索有用信号。一旦捕获成功,停止搜索,进入跟踪过程。与此同时,不断地对有用信号进行检测,一旦发现由于某种原因引起同步丢失,则重新开始新一轮的捕获和跟踪。同步流程如图1所示。
扩频码跟踪扩频码跟踪是系统同步的重要环节,扩频接收机一旦捕获到有用信号,本地参考PN码必须准确跟踪接收到的信号,减少接收机与发射机之间扩频码相位不能完全对准而造成的系统处理增益的损失,使系统最大限度地发挥其应有的抗干扰能力。扩频码同步通常采用延迟锁定环的跟踪方法。
(1)延迟锁定环
延迟锁定环(DLL)在跟踪两个相关波形的延迟差时是最佳电路。DLL是一个非线性反馈系统,其反馈环内采用了互相关的方式。延迟锁定环的基本思想是产生一个在一定范围内(比如一个码片时间)对于定时误差是单调变化的误差函数,而且很容易使定时误差为0时这个误差函数的值也为0。这样,时钟相位就可以利用这个误差函数进行负反馈调节,使其与发送时钟的误差得到控制。
(2)非相干延迟锁定环原理
延迟锁定环按照实现方式可以分成相干方式和非相干方式。相干方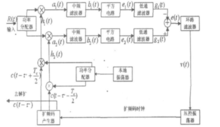 式是指在确知发射端载波频率和相位的情况下进行工作,即假定本地载波已和外来信号同频同向,这意味着在码同步之前载波同步环必须先建立起来;非相干方式没有这些要求,它在没有获得载波同步之前就可以工作。扩频系统通常是在信噪比极低的环境中工作,在未对扩频信号解扩获得扩频增益之前进行解调是很困难的;同时,调制是相干的,解调之前必须提取相干载波,在信噪比非常低的条件下提取这种相干载波也是非常困难的。所以,在实际应用中一般采用非相干方式。本文将重点讨论非相干延迟锁定环。图2为非相干延迟锁定环的原理。
式是指在确知发射端载波频率和相位的情况下进行工作,即假定本地载波已和外来信号同频同向,这意味着在码同步之前载波同步环必须先建立起来;非相干方式没有这些要求,它在没有获得载波同步之前就可以工作。扩频系统通常是在信噪比极低的环境中工作,在未对扩频信号解扩获得扩频增益之前进行解调是很困难的;同时,调制是相干的,解调之前必须提取相干载波,在信噪比非常低的条件下提取这种相干载波也是非常困难的。所以,在实际应用中一般采用非相干方式。本文将重点讨论非相干延迟锁定环。图2为非相干延迟锁定环的原理。
同步失锁 由扩频系统的同步流程可知,在扩频码跟踪过程中,需要实时进行同步失锁的判断。一旦由于外界因素使同步丢失,同步系统需要进入初始同步环节,开始新一轮的捕获和跟踪。在此过程中,存在同步失锁的判断这一关键问题,一般方法是先进行Matlab仿真,获得理论上的参数,然后结合实际电路进行具体门限值的设置。
由扩频系统的同步流程可知,在扩频码跟踪过程中,需要实时进行同步失锁的判断。一旦由于外界因素使同步丢失,同步系统需要进入初始同步环节,开始新一轮的捕获和跟踪。在此过程中,存在同步失锁的判断这一关键问题,一般方法是先进行Matlab仿真,获得理论上的参数,然后结合实际电路进行具体门限值的设置。
为了降低同步失锁误判概率,本文采用门限检测和峰值检测相结合的方法,并进行多次检测,以进一步降低虚警概率。失锁判断门限值设置方法为:首先进行Matlab仿真,得出理论门限值,一般取理论值的1/4~1/2,在本设计中取1/3理论值。峰值检测是实际电路中检测的峰值,可以和理论门限值结合起来一起使用。为了进一步降低虚警概率,本设计对门限值和峰值分别进行3次检测,即当连续3次检测到同步失锁时,才跳出进入重新捕获环节,开始新一轮的同步。图3所示是同步失锁的FPGA实现结果。可以看到,设计基本达到要求。由图3上半部分可知,采用63位PN码、接收端8倍数据速率采样,延迟锁定环每经过一个码元周期(504个时钟)对PN码的时钟调整一次,发现超出锁定门限设置时,输出一个脉冲标志Pulse。由图3下半部分可知,当Pulse连续输出三个脉冲标志时,即判断为同步丢失,输出重新捕获的标志ReSy,进入新一轮的同步环节。2
GPS接收机的失锁后处理研究GPS接收机在城区应用时,主要关心的一个问题就是频繁的某颗星或多颗星信号中断。城市中大楼和高架的短时遮挡很频繁,同时存在外部干扰源的干扰,这将导致被遮挡的卫星不停地在捕获和跟踪状态之间切换,严重影响定位的连续性。本文提出的失锁后处理可以有效解决这个问题。
卫星信号失锁之后可以选择重新捕获和快速恢复两种方案。重新捕获指的是因为失锁时间过长导致的码相位以及多普勒频率完全无法预知,只有重新启动捕获模块,对这颗卫星信号进行全码相位或大范围码相位搜索以及大范围的多普勒频率搜索。如果仅失锁了一段时间,但仍然可以通过一些途径获知当前时刻的码相位范围值以及较小的多普勒频率范围,那么不需要占用捕获通道,可以直接用跟踪通道里的积分电路通过在获知的多普勒频点上做下变频,在获知的码相位范围内通过扣本地码钟来解扩,当积分值大于门限时认为捕获成功,然后直接切换到跟踪状态,进而快速参与定位,这称作快速恢复。重新捕获需要较长的时间,尤其当接收机捕获通道较少时,每颗失锁的卫星都需要排队等待捕获通道,这需要一定的等待时间,卫星信号捕获也需要一定的时间。快速恢复能节省这些时间,保证接收机因干扰或信号遮挡等原因造成的短时间定位中断具有快速恢复定位能力。快速恢复需要从失锁前的多种状态和到当前时刻的时间计数,推算出当前时刻的多普勒频率、码相位和导航比特边界。本文研究了包括多普勒频率预测、码相位预测、导航比特边界预测的推算条件、推算方法和推算误差,研究了失锁后处理算法,并通过对多种失锁情形的模拟验证了此失锁后处理算法具有一定的工程应用价值。
预测算法(1)载波多普勒频率预测
从星历或历书可以得到当前时刻的卫星位置以及速度矢量,再根据估算出的当前时刻接收机位置和接收机速度,代入式可以计算得到多普勒频率。当前时刻的接收机位置和接收机速度是未知项,这里用失锁时刻的接收机位置和接收机速度进行推算得到,推算的假设条件是这段失锁时间内接收机仍然保持失锁前的运动速度。
多普勒频率预测的主要误差来自估算出的当前时刻接收机的位置和接收机速度,在这段失锁时间内,若接收机的运动状态发生改变,则会导致当前时刻的接收机位置和速度不准,进而影响最终推算出的多普勒频率。所以,最大预测误差需要考虑接收机的载体最大运动状态改变量导致的接收机最大位置预测误差和最大速度预测误差,可通过建模仿真得到多普勒频率预测最大误差fmax,进而得到多普勒频率范围。
(2)码相位预测
根据失锁时刻的正确码相位以及载波多普勒频率,再加上失锁前到当前时刻的接收机时间计数,可以推算出当前时刻的码相位。这里的推算有个假设,即失锁时间段内的码多普勒频率没有变化。
这里的预测误差主要源于失锁时间段内码多普勒频率不变的假设。一般动态的GPS接收机短时间内码多普勒频率的变化量很小,所以码相位预测误差很小。当接收机应用在高动态场合时,码相位预测误差需要做进一步分析和计算,由码多普勒频率的最大变化量,通过式可以反解出码相位预测误差值超过几个码片的时间nclk,这个时间值可以作为失锁后处理流程中状态切换选择的时间门限值,时间计数超过该时间门限值选择重新捕获,小于该门限值选择快速恢复。
失锁后处理研究卫星信号因短暂遮挡造成信号失锁以后,通过上节的预测算法实时计算得到当前时刻的多普勒频率、码相位和比特边界,一旦无遮挡以后,通过扣本地码钟捕获快速进入跟踪状态,这样就能迅速地参与定位。在实际的复杂应用场合下,每颗星的遮挡时间不一样,且面临某颗卫星信号不是因遮挡而是长时间丢失的可能,所以后处理算法的综合考虑尤其重要。
对于因短时间遮挡信号中断、短暂信号强度衰减或短暂干扰而造成的某颗或多颗卫星失锁,设计方案一定要有抗长时间遮挡的能力,以及快速地恢复到能参与定位的能力。所以有如下设计:①通过有效消除接收机钟漂来提高多普勒频率和码相位预测准确度;②增加扣钟捕获的扣钟范围,提高对码多普勒频率预测误差的容忍能力;③使用锁频环,提高对载波多普勒频率预测误差的容忍能力;④使用宽带宽初始跟踪和载波环辅助码环,加快码环稳定。对于因某颗星已不在接收机视距范围内而造成的信号失锁,接收机要尽快释放通道资源,为其它可见卫星信号让道。所以,在选择重新捕获和快速恢复前,需要对失锁的卫星做仰角判断,如果仰角不够好,就直接释放这颗卫星的通道资源。
若失锁后的卫星或接收机运动状态发生很大改变,将造成载波多普勒频率预测出现大误差,致使扣本地钟的捕获方式不成功。这时候需要设置时间门限Tth1,当时间超过门限时申请捕获通道资源重新捕获,如果失锁的卫星重新捕获一直不成功,而捕获时间超过门限Tth2,则释放捕获通道,重新排队申请下一轮的捕获通道,若第三轮仍捕获不成功,则释放这颗卫星的捕获和跟踪通道。
研究结论我们使用SPIRENT的GPS模拟源,设置卫星信号失锁的时间,模拟各种运动模型,验证了失锁后处理设计的GPS接收机有以下性能:
①低动态和短时失锁。设置所有卫星信号都中断20 s,运动模型设置为车载和静止。因为预测求出的多普勒频率以及码相位误差不大,信号中断恢复后,多颗星几乎同时重新扣本地码钟捕获成功和跟踪锁定,GPS接收机重新定位的时间在1 s以内。
②高动态和长时间的失锁。设置所有卫星信号中断1min,运动模型设置为飞机模型。因为预测求出的多普勒频率以及码相位误差较大,部分卫星扣本地码钟捕获不成功,而后通过启动重捕达到锁定并参与定位。这就保证了接收机的稳健性。
③弱信号时,设置接收机载噪比为25 dB-Hz,所有卫星信号都中断20 s。同步边界的预测对接收机的快速恢复定位非常重要,因为信号重新锁定后,就可以直接进行比特数据解调和快速恢复参与定位,GPS接收机重新定位的时间在1 s以内。若没有加同步边界预测,此时重新找比特边界需要用秒级的非相干时间,这就影响了电文解调和定位恢复速度。综上所述,此失锁后处理设计能增强GPS接收机的稳健性,加快接收机失锁后的定位恢复速度,具有一定的工程应用价值。3
本词条内容贡献者为:
陈红 - 副教授 - 西南大学
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国