

静态姿势稳定性可以被定义为在牢固不变的支撑面上保持平稳的一种能力。这里的“平稳”为尽可能保持身体不活动。一般来说,人体的静态姿态主要包含站、坐和卧等,而研究最多的,也是在实际中最常用的是站姿的静态稳定性问题。
介绍许多因素会对静态姿势稳定性构成影响。静态姿势控制系统非常复杂,依赖于感知系统精确地感知外界环境,和在中枢神经系统水平的前庭、视觉和本体感知输入对外界信息的处理和整合。中枢神经系统根据目前姿态可以采用多种不同的策略来保持姿势平衡和稳定。除了个体的感知和运动能力外,支撑面积也在姿势稳定性有重要作用。这里所谓的支撑面积包含足的姿势、肌骨系统特征和约束条件等。
人体环节位移人体环节位移指的是头、躯干等人体环节做出适应性动作,改变位置以维持平衡。人体在站立时的环节的活动通常被描述为“倒钟摆模型”(图1)。在静态站立时,在矢状面内,人体围绕踝关节前后摇摆,正常成人摆动范围约为5~7 mm。在冠状面内,同样存在类似的现象,正常成人的摆动范围约为3~4 mm。
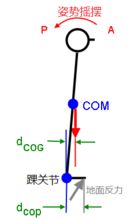
图****1 人体静态站立的倒钟摆模型
肌肉活动性在平衡控制时,肌肉活动是预期的前馈机制,的其目的在于阻止倒钟摆模型倾倒,并将身体拉回到参考位置。与之相反地,由于踝关节肌肉的力学性质产生的内在反馈则体现为短期内的零延迟,来延缓倒钟摆模型的倾倒趋势。倒钟摆模型将质心和压力中心联系起来,其中前者是被控变量,后者是控制变量。在临界水平,肌肉本身不足以稳定身体时,前馈控制的机制的补偿作用就非常必要。
测量在这里强调一下反复提到的几个概念。
(1) 质心(centre of mass, COM) 是一个点,可以在全局坐标系内集中等效全部身体质量。正常站立时,人体的质心通常位于第二骶椎附近。
(2) 重心(Centre of gravity, COG)是质心在竖直方向上的投影。
(3) 压力中心(centre of pressure, COP)可以定义为人体全部地面反力集中作用等效的一点。
如图2所示,当压力中心在中心前面时,逆时针力矩(Iα)作用在踝关节,使得躯干向后旋转,从而达到平衡。而当压力中心在中心后面时,顺时针力矩作用在踝关节,导致身体躯干向前旋转,从而失去平衡跌倒。
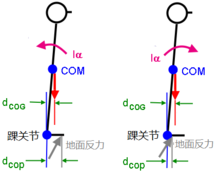
图****2 压力中心与中心的关系
扩展阅读胡耿丹, 王乐军, 牛文鑫. 运动生物力学. 同济大学出版社. 2013年12月, 第1版.
Goldie PA, Bach TM, Evans OM. Force platform measures for evaluating postural control: reliability and validity. Arch Phys Med Rehabil. 1989; 70(7): 510-517.
Yang JF, Winter DA. Electromyography reliability in maximal and submaximal isometric contractions. Arch Phys Med Rehabil. 1983; 64(9): 417-420.
本词条内容贡献者为:
牛文鑫 - 助理教授 - 同济大学医学院
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国