

简介
卫星捕获技术是指卫星在地面辅助引导和自主引导下,运动到目标卫星所处的空间轨道,然后缓慢接近目标航天器,最终处于给定的捕获容差范围内;卫星在测距传感器、视觉传感器和数据运算处理器等控制系统的相互作用下,缓慢靠近目标飞行器并与目标星实现刚性锁紧连接,从而与目标飞行器完全整合为一体,最终使两航天器的相对速度为零的过程。2
技术背景自从人类第一颗卫星发射成功后,太空活动就不断增加。由于运载能力的限制,空间站需由多个舱段在轨组装而成;航天器、运载器等进入空间后产生的或绕地球轨道运行的一切无任何用途的空间碎片,会给将来太空空间的可持续发展和利用产生潜在威胁;航天器在轨加注能够延长工作寿命,提高飞行器的机动性能,实现更远距离的太空飞行;在现代化战役中,空间对战局的发展乃至战役的成果都发挥着越来越重要的功用,各国均加强了空间攻防对抗技术的钻研力度。
从而,伴随着当今航天任务需求的不断增多,比如在轨加注燃料、组装国际空间站、空间攻防对抗等,各国开始深入研究在轨服务维修、空间自主交会对接等空间服务技术,甚至包括很多航天事业刚刚起步的国家也正在非常努力地发展多种空间技术。目标是最终有能力进行大型空间设施的建设、提高飞行器的轨道自主机动能力、延长飞行器使用寿命和捕获敌方卫星。作为在轨服务核心技术的在轨卫星捕获技术,具备极高的军民两用双重价值。2
技术研究现状国外研究现状国外卫星捕获技术研究中典型的非合作方案包括美国FREND三机械臂+可更换执行器方案、德国DEOS的单机械臂+伸缩杆方案以及欧洲CX-OLEV、SMART-OLEV伸缩杆+插锁机构和欧空局ROGER飞网方案等。
(1)美国FREND机械臂
“近期能演示验证的空间机器人技术”是由美国国防高级研究计划局资助的一项课题,原名为“通用轨道修正航天器”,于2002年正式开展研究,后期改名为FREND机械臂,接着成功完成了两次地面试验研究。FREND机械臂的最大优点是:其能适用于多数空间非合作目标卫星,并能够保持与目标星之间的相对姿态,实现捕获后辅助目标星脱离其运行轨道。当然也适用于合作目标卫星,对其进行在轨服务等操作。2
(2)德国DEOS
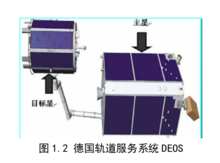 DEOS项目由德国宇航中心投资,德国OHB技术公司负责整个系统的管理工作。DEOS项目研究要实现的目标有:运用服务飞行器实现对一个在轨失控翻滚非合作目标卫星的捕获。二是辅助实现任务要求的进入预定轨道的飞行器脱离其运行轨道。服务航天器还通过轨道机动,与目标航天器多次执行交会、捕获和对接操作。该项目自2007年启动以来,已完成系统定义和初始设计工作,至2010年已完成详细的设计工作。2
DEOS项目由德国宇航中心投资,德国OHB技术公司负责整个系统的管理工作。DEOS项目研究要实现的目标有:运用服务飞行器实现对一个在轨失控翻滚非合作目标卫星的捕获。二是辅助实现任务要求的进入预定轨道的飞行器脱离其运行轨道。服务航天器还通过轨道机动,与目标航天器多次执行交会、捕获和对接操作。该项目自2007年启动以来,已完成系统定义和初始设计工作,至2010年已完成详细的设计工作。2
(3)OLEV对接机构
OLEV对接机构主要有两种:美国的轨道延寿飞行器CX-OLEV与欧洲的SMART-OLEV,两者均属于轨道延寿飞行器,即用于因为燃料耗尽而寿命终结的地球静止轨道通信卫星。CX-OLEV轨道延寿器由美国轨道复活公司(ORC)和英国轨道复活有限公司(ORL)联合研制。而SMART-OLEV是一个由欧洲企业联盟进行管理的纯商业项目,其核心装置——捕获工具,由德国宇航中心研制,该项目已经完成了阶段B的研制工作。2
国内研究现状国内交会对接技术刚刚起步,空间交会对接技术的环境特殊性、复杂性和高成本,使得研究成果相对较少。
2012年7月20日,我国使用“一箭三星”将三颗卫星送入预定轨道,这三颗科学实验卫星分别为“创新三号”、“试验七号”以及“实践十五号”,由位于太原的卫星发射中心发射升空,长四丙运载火箭执行本次发射,三颗卫星进入轨道后,将开展一项涉及太空机械臂操作的科学实验。“试验七号”上装有用于测试的机械臂,主要验证在轨道上通过机械臂捕获另一个航天器的技术。1
“试验七号”等进行的卫星捕获实验中作为关键的在于天基目标测量,需要掌握两个航天器的相对姿态信息,这样才能从对目标航天器实施靠近作业,至少要能感知目标航天器的几何构型,哪个部位适合“下手”,综合判断目标航天器是否可以满足捕获条件,这直接关系到捕获的成败。在中国前几次的空间交互对接任务中,交会雷达是一个重要节点,主要使用了Ku波段、毫米波段还有激光雷达等措施,尤其是激光雷达,在测量精度和分辨率上都较好。反卫星平台上使用CCD光学测量技术也有重要的用途,可以提供在轨捕获时的图像数据,对两个航天器相对姿态的判断非常重要,其主要用于近距离的接触,作用范围也比激光雷达和微波雷达要小很多,大概在几百米的近距接触上有着非常好的效果。1
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国